Neurocomputing
Semantic segmentation
Semantic segmentation
- Semantic segmentation is a class of segmentation methods where you use knowledge about the identity of objects to partition the image pixel-per-pixel.
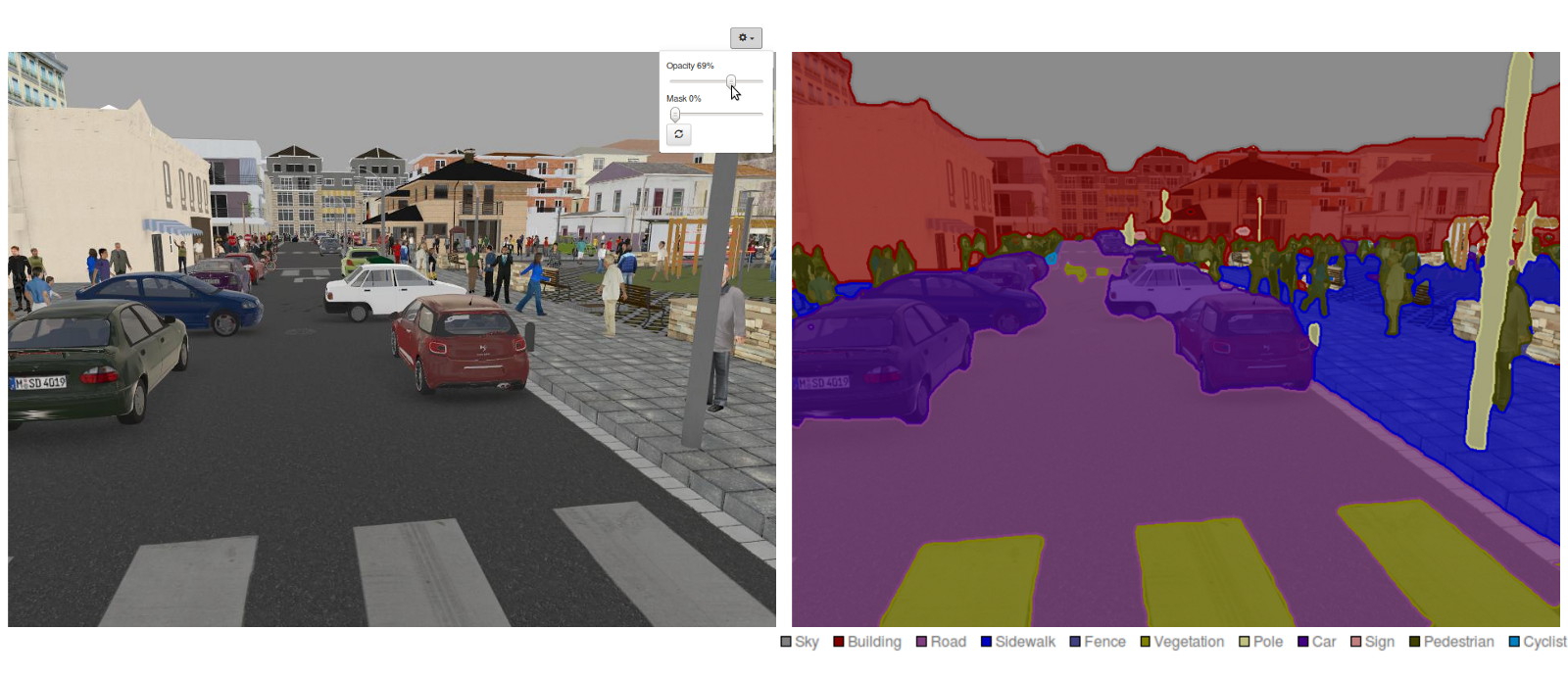
Classical segmentation methods only rely on the similarity between neighboring pixels, they do not use class information.
The output of a semantic segmentation is another image, where each pixel represents the class.
Semantic segmentation
The classes can be binary, for example foreground/background, person/not, etc.
Semantic segmentation networks are used for example in Youtube stories to add virtual backgrounds (background matting).

- Clothes can be segmented to allow for virtual try-ons.

Datasets for semantic segmentation

There are many datasets freely available, but annotating such data is very painful, expensive and error-prone.
- PASCAL VOC 2012 Segmentation Competition
- COCO 2018 Stuff Segmentation Task
- BDD100K: A Large-scale Diverse Driving Video Database
- Cambridge-driving Labeled Video Database (CamVid)
- Cityscapes Dataset
- Mapillary Vistas Dataset
- ApolloScape Scene Parsing
- KITTI pixel-level semantic segmentation
Output encoding
- Each pixel of the input image is associated to a label (as in classification).
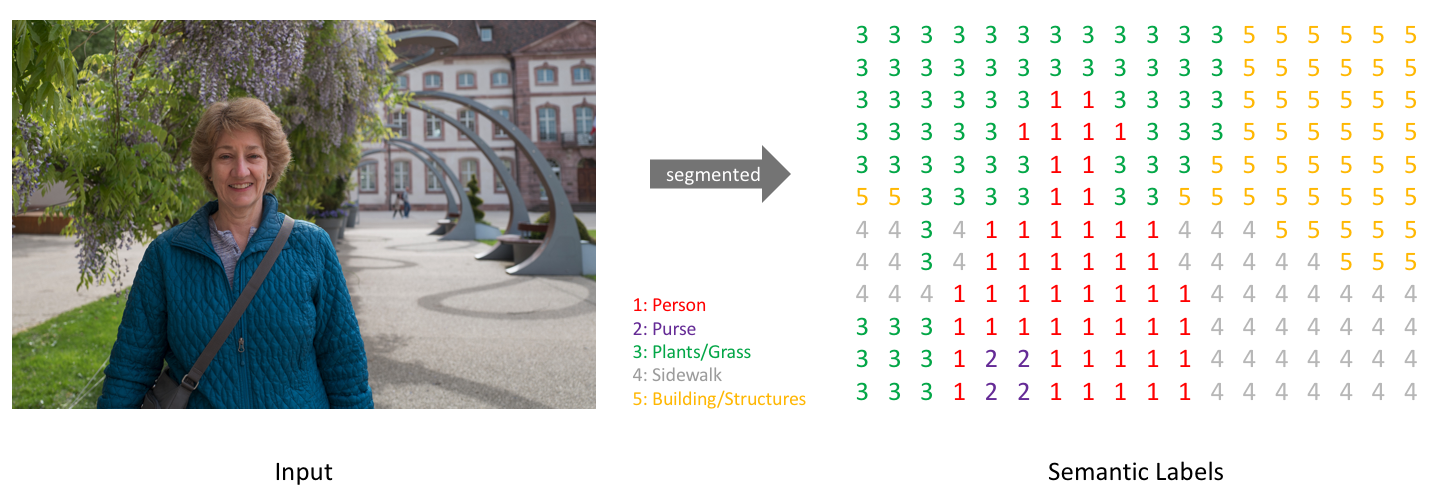
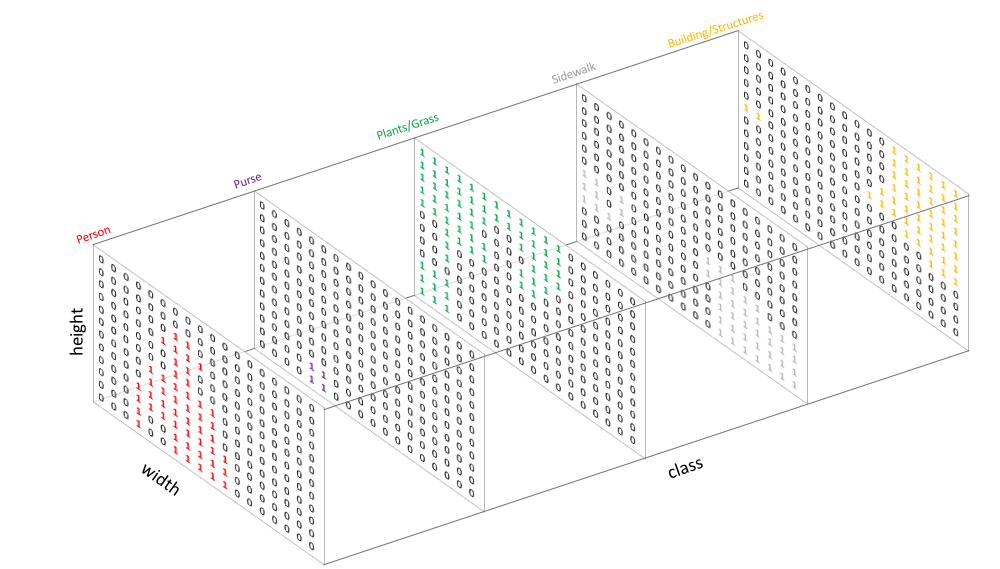
Output encoding
- A one-hot encoding of the segmented image is therefore a tensor:
Fully convolutional network
A fully convolutional network only has convolutional layers and learns to predict the output tensor.
The last layer has a pixel-wise softmax activation. We minimize the pixel-wise cross-entropy loss
\mathcal{L}(\theta) = \mathbb{E}_\mathcal{D} [- \sum_\text{pixels} \sum_\text{classes} t_i \, \log y_i]
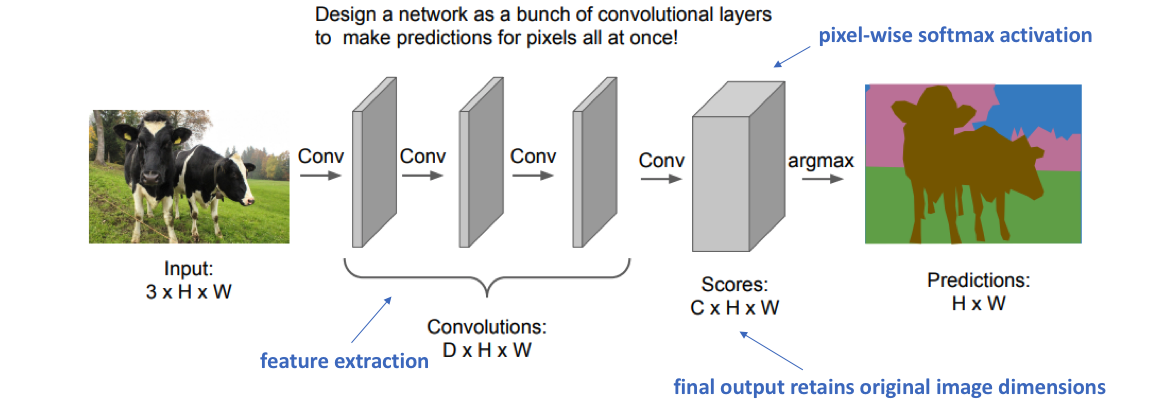
- Downside: the image size is preserved throughout the network: computationally expensive. It is therefore difficult to increase the number of features in each convolutional layer.
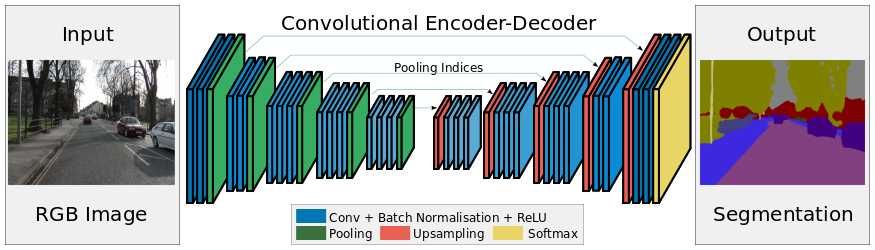
SegNet: segmentation network
SegNet has an encoder-decoder architecture, with max-pooling to decrease the spatial resolution while increasing the number of features.
But what is the inverse of max-pooling? Upsampling operation.
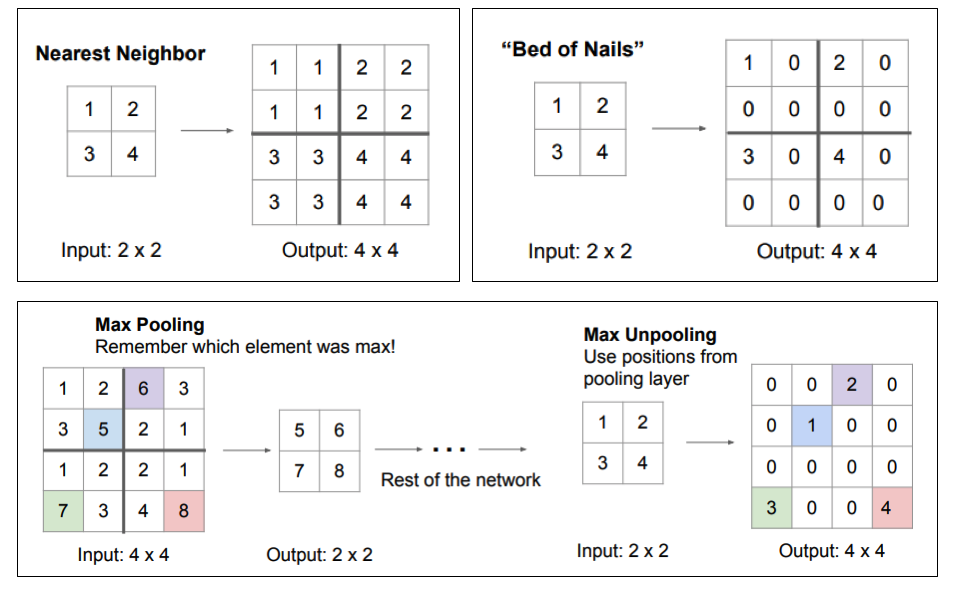
Upsampling: some methods
Nearest neighbor and Bed of nails would just make random decisions for the upsampling.
In SegNet, max-unpooling uses the information of the corresponding max-pooling layer in the encoder to place pixels adequately.
Upsampling: transposed convolution
- Another popular option in the followers of SegNet is the transposed convolution.
![]()
The original feature map is upsampled by putting zeros between the values.
A learned filter performs a regular convolution to produce an upsampled feature map.
Works well when convolutions with stride are used in the encoder.
Quite expensive computationally.
![]()
U-Net
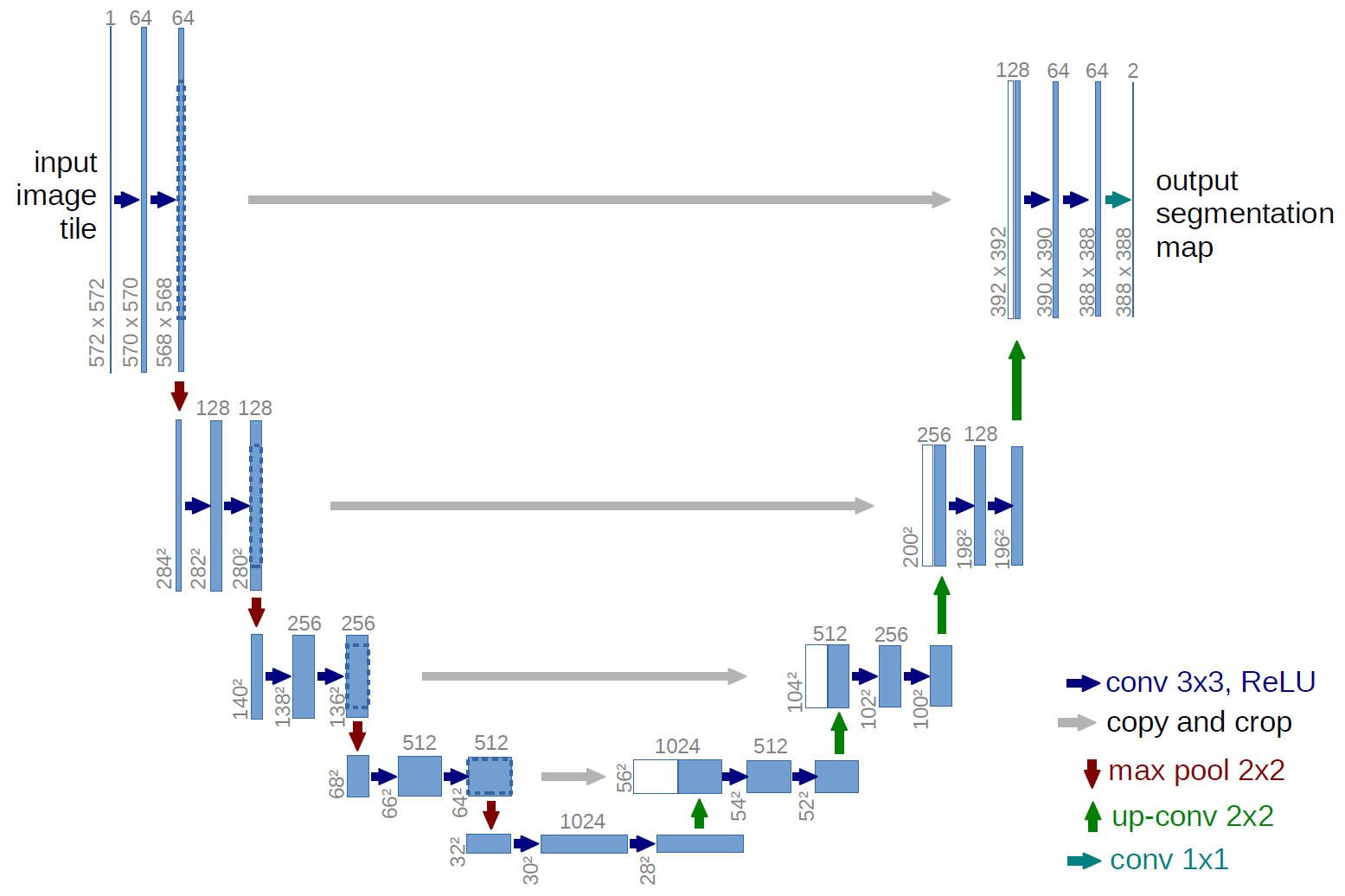
The problem of SegNet is that small details (small scales) are lost because of the max-pooling. the segmentation is not precise.
The solution proposed by U-Net is to add skip connections (as in ResNet) between different levels of the encoder-decoder.
The final segmentation depends both on:
large-scale information computed in the middle of the encoder-decoder.
small-scale information processed in the early layers of the encoder.
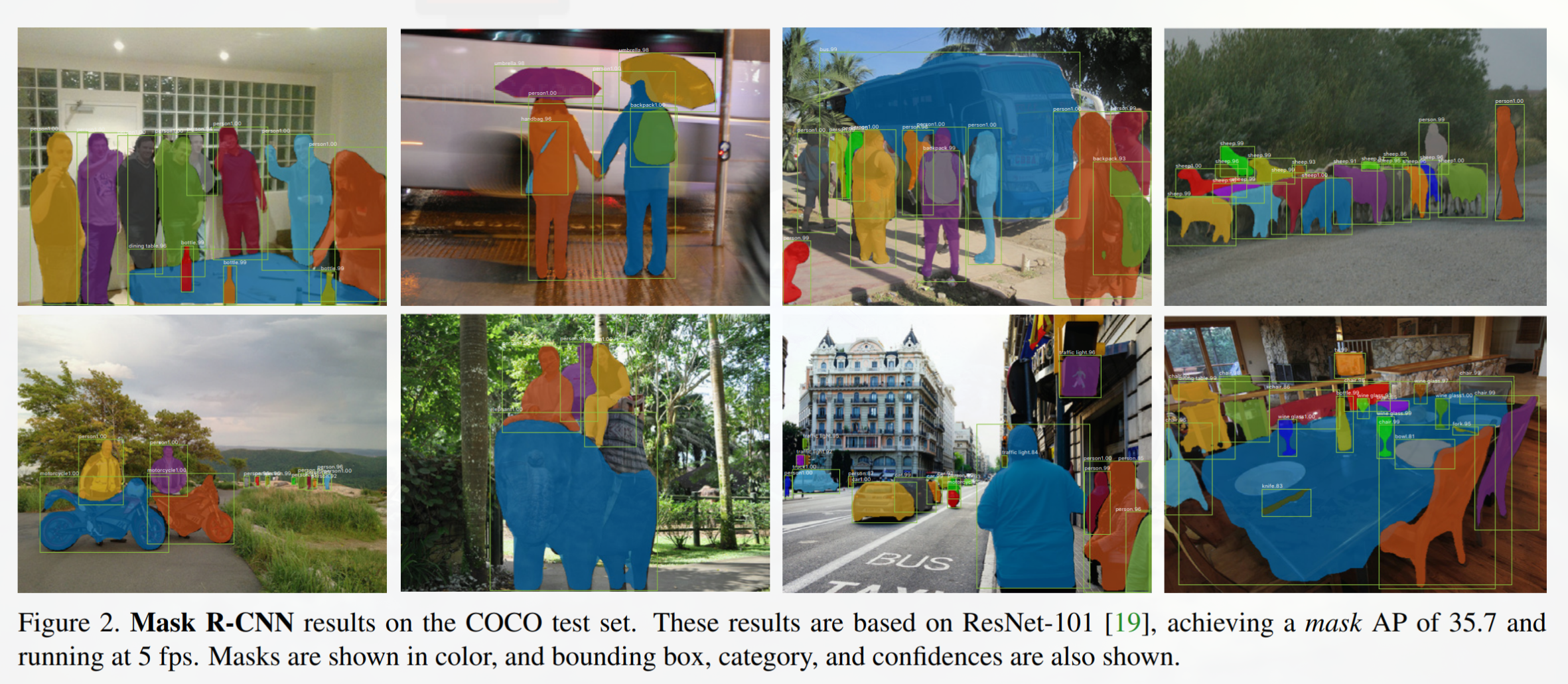
Mask R-CNN
For many applications, segmenting the background is useless. A two-stage approach can save computations.
Mask R-CNN uses faster R-CNN to extract bounding boxes around interesting objects, followed by the prediction of a mask to segment the object.
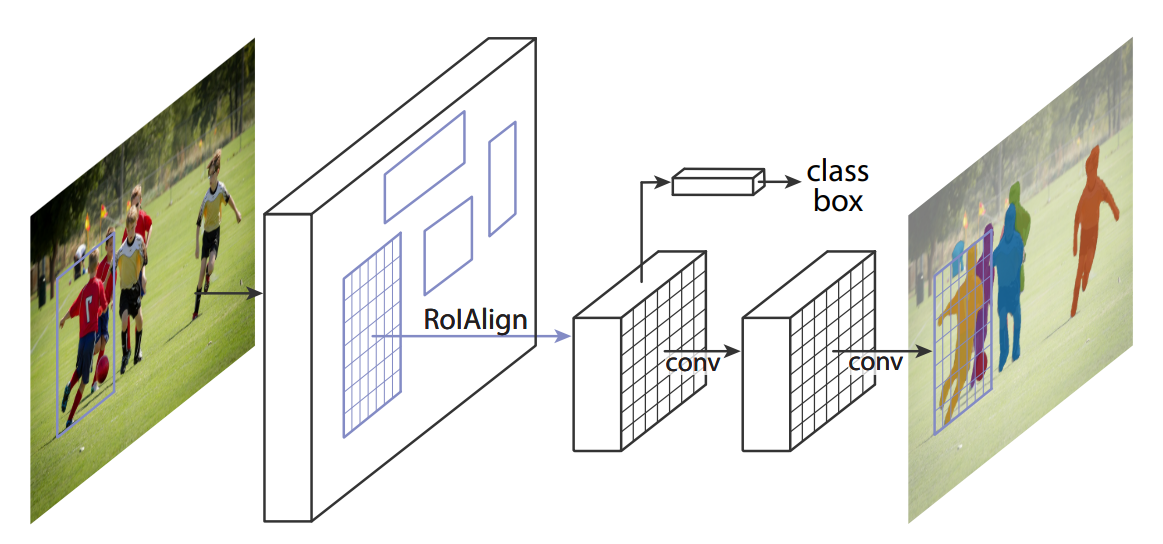
Mask R-CNN