Neurocomputing
Reservoir computing
Reservoir computing
The concept of Reservoir Computing (RC) was developed simultaneously by two researchers at the beginning of the 2000s.
Herbert Jaeger (Bremen) introduced echo-state networks (ESN) using rate-coded neurons (Jaeger, 2001).
Wolfgang Maass (TU Graz) introduced liquid state machines (LSM) using spiking neurons (Maass et al., 2002).
What is wrong with RNNs and LSTMs?
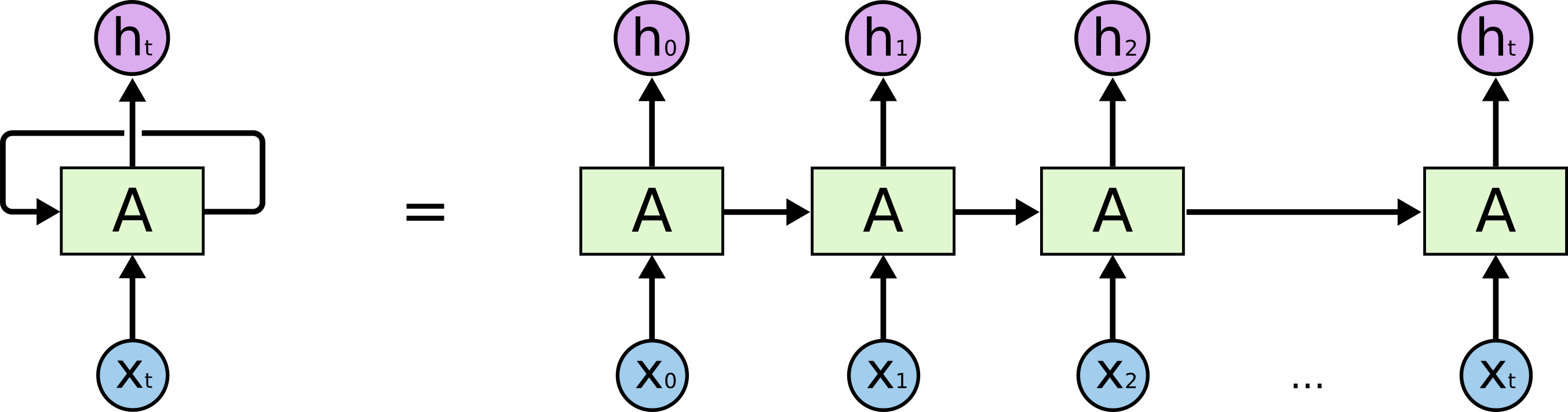
The recurrent networks from ML (LSTM, GRU) are very powerful thanks to the backpropagation through time (BPTT) algorithm.
However, they suffer from several problems:
- Long training times (multiple BP operations per step -> we have to limit the horizon)
- Vanishing gradients -> not-so-long-term dependencies
- Need for precisely sampled inputs (no sparse data)
- Robustness to noise and outliers.
Echo-state networks
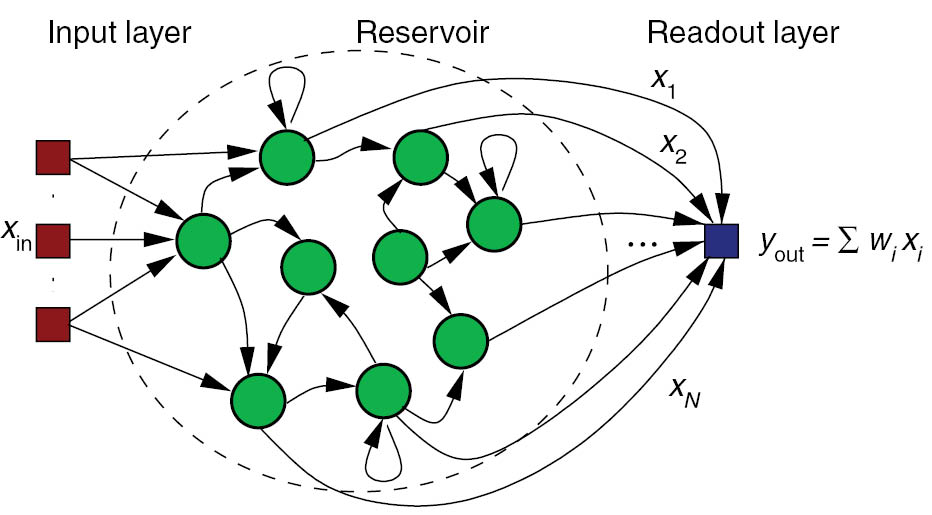
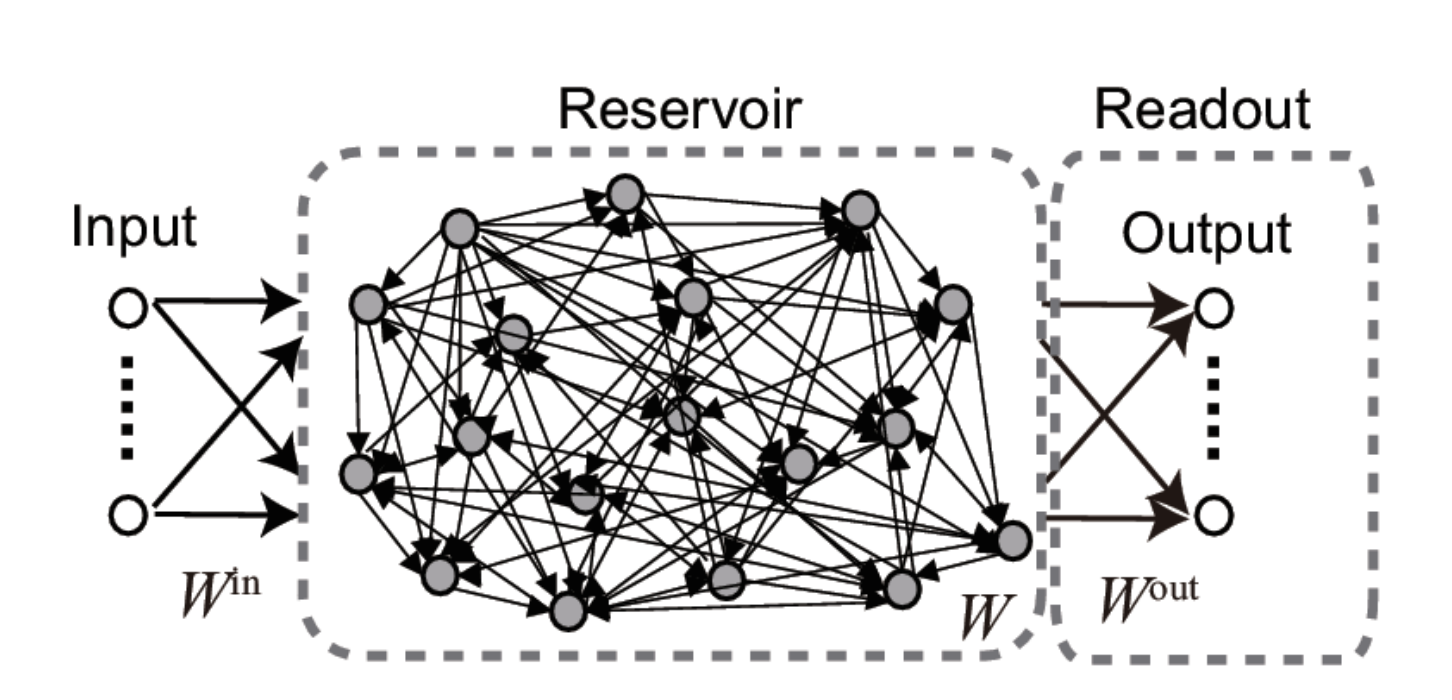
- An ESN is a set of recurrent units (sparsely connected) exhibiting complex spatiotemporal dynamics.
Rate-coded neurons in the reservoir integrate inputs and recurrent connections using an ODE: \tau \, \frac{d \mathbf{x}(t)}{dt} + \mathbf{x}(t) = W^\text{IN} \times \mathbf{I}(t) + W \times \mathbf{r}(t)
The output of a neuron typically uses the
tanhfunction (between -1 and 1):
\mathbf{r}(t) = \tanh \, \mathbf{x}(t)
- Readout neurons (or output neurons) transform linearly the activity in the reservoir:
\mathbf{z}(t) = W^\text{OUT} \times \mathbf{r}(t)
In the classical version of the ESN, only the readout weights are learned, not the recurrent ones.
One can use supervised learning to train the readout neurons to reproduce desired targets.
Echo-state networks
Inputs \mathbf{I}(t) bring the recurrent units in a given state or trajectory.
The recurrent connections inside the reservoir create different dynamics \mathbf{r}(t) depending on the strength of the weight matrix.
Readout neurons linearly transform the recurrent dynamics into temporal outputs \mathbf{z}(t).
Supervised learning (delta learning rule, OLS) trains the readout weights to reproduce a target \mathbf{t}(t).
It is similar to a MLP with one hidden layer, but the hidden layer has dynamics.
Echo-state networks
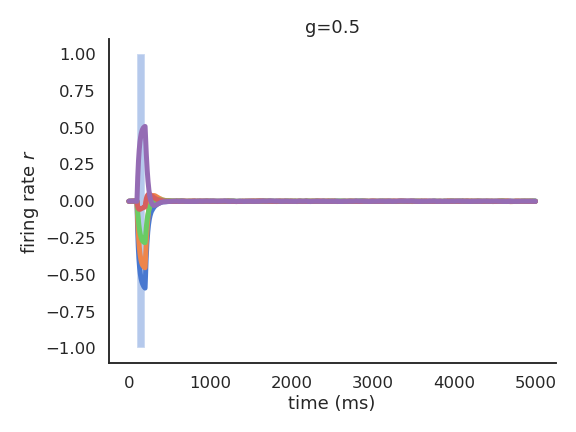
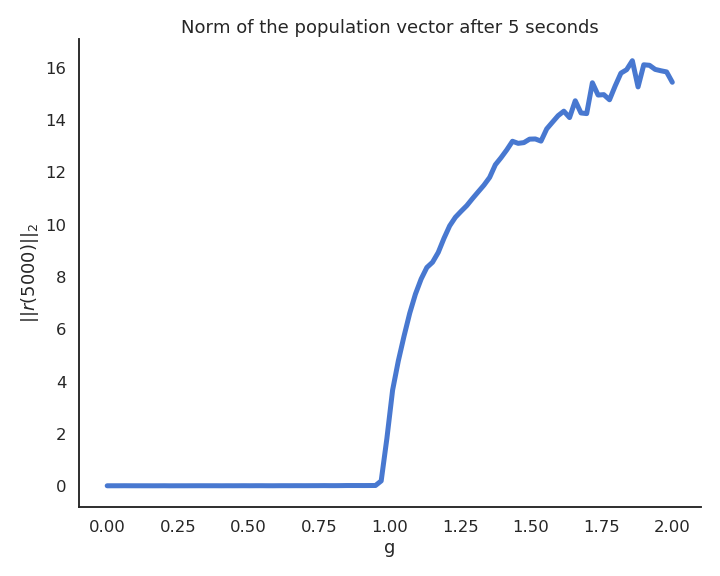
- When g<1, the network has no dynamics: the activity quickly fades to 0 when the input is removed.
Echo-state networks
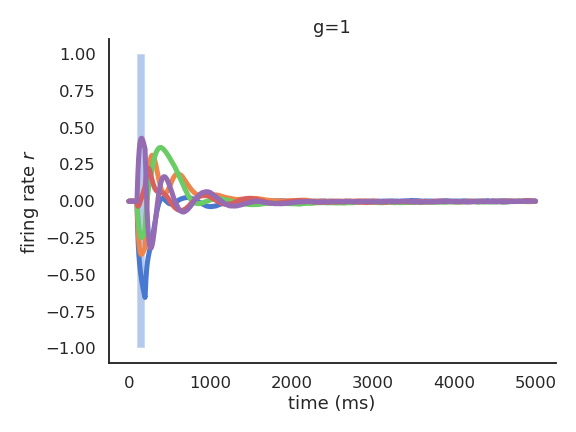
- For g=1, the reservoir exhibits some transcient dynamics but eventually fades to 0 (echo-state property).
Echo-state networks
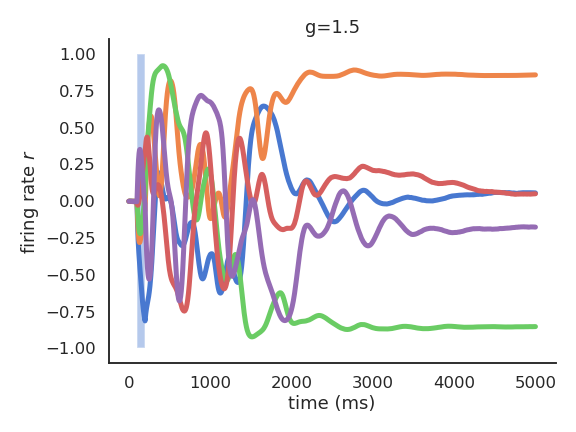
- For 1 \leq g \leq 1.5, the reservoir can exhibit many stable attractors due to its rich dynamics.
Echo-state networks
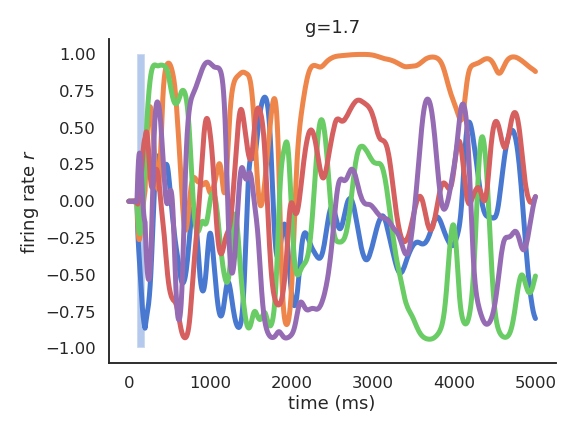
- For higher values of g, there are no stable attractors anymore: chaotic behavior.
Representational power at the edge of chaos
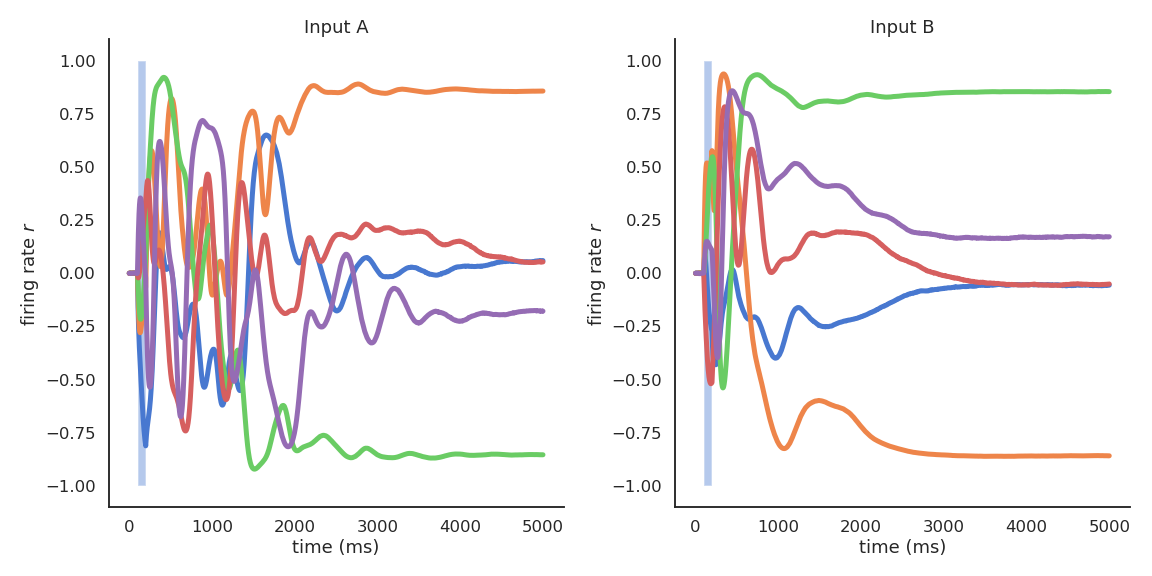
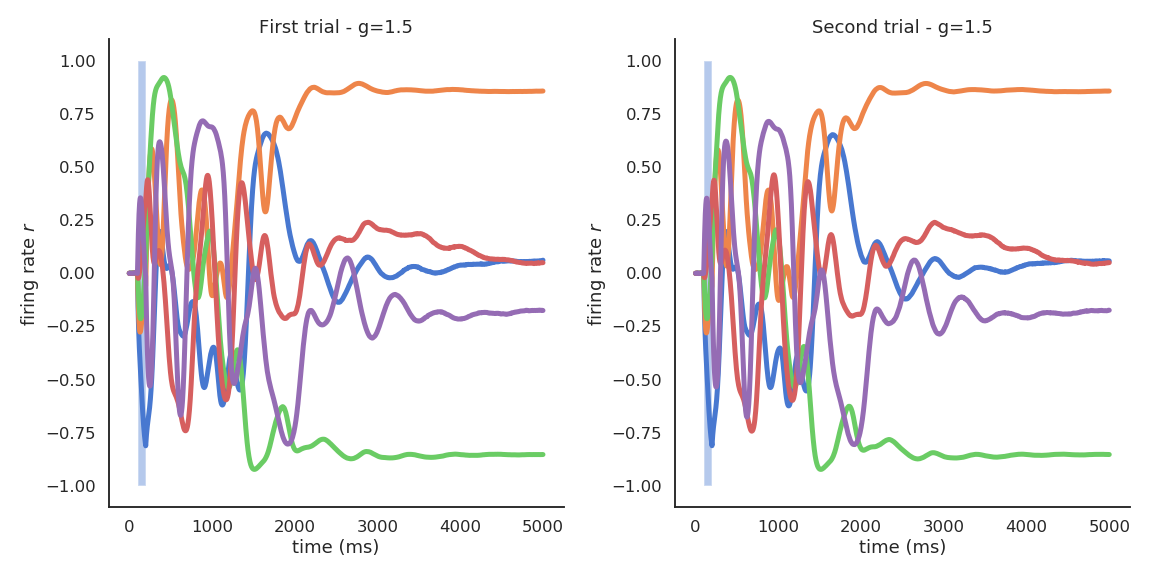
- For g = 1.5, different inputs (initial states) lead to different attractors.
Apparition of stable attractors
- The weight matrix must have a scaling factor above 1 to exhibit non-zero attractors.
Stable attractors at the edge of chaos
- For a single input, the attractor is always the same, even in the presence of noise or perturbations.
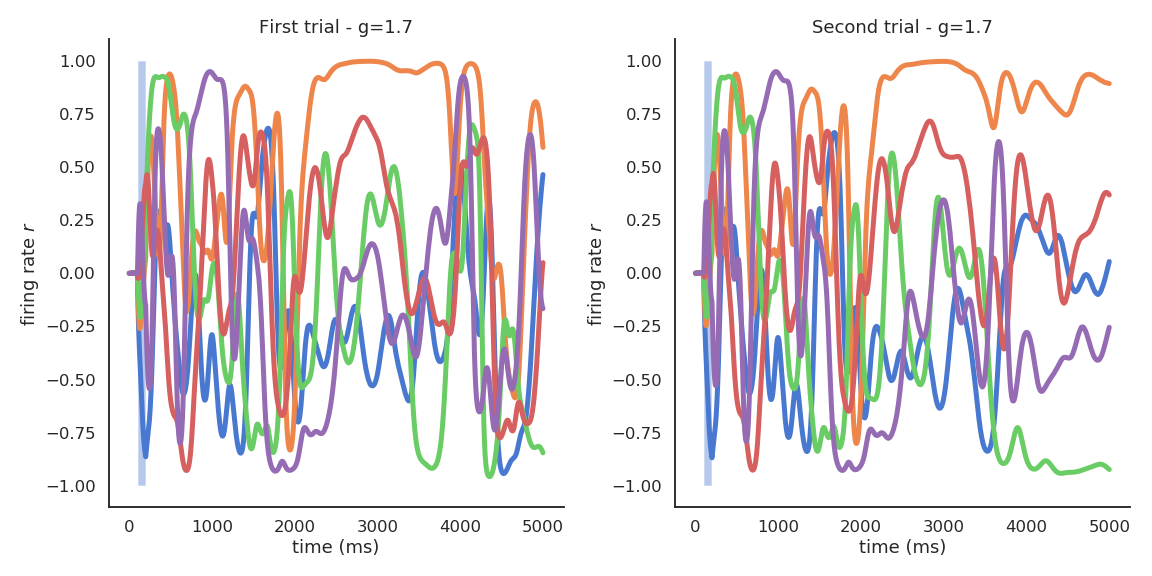
Chaotic behavior for high values of g
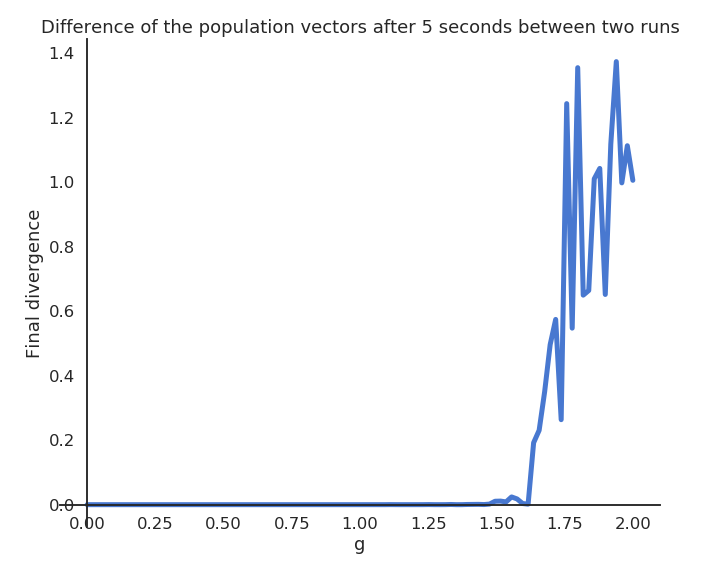
- In the chaotic regime, the slightest uncertainty on the initial conditions (or the presence of noise) produces very different trajectories on the long-term.
Edge of chaos
The chaotic regime appears for g > 1.5.
g=1.5 is the edge of chaos: the dynamics are very rich, but the network is not chaotic yet.
Training the readout neurons

- Using the reservoir as input, the linear readout neurons can be trained to reproduce any non-linear target signal over time:
\mathbf{z}(t) = W^\text{OUT} \times \mathbf{r}(t)
- The batch ordinary least squares (OLS) regression algorithm using the matrix \mathbf{R} of recorded activations is often used:
W^\text{OUT} = (\mathbf{R}^T \times \mathbf{R})^{-1} \times \mathbf{R}^T \times \mathbf{T}
reg = sklearn.linear_model.LinearRegression()
reg.fit(r, t)- Reservoirs are universal approximators:
Given enough neurons in the reservoir and dynamics at the edge of the chaos, a RC network can approximate any non-linear function between an input signal \mathbf{I}(t) and a target signal \mathbf{t}(t).
Pattern separation
The reservoir projects a low-dimensional input into a high-dimensional spatio-temporal feature space where trajectories becomes linearly separable.
The reservoir increases the distance between the input patterns.
Input patterns are separated in both space (neurons) and time: the readout neurons need much less weights than the equivalent MLP: better generalization and faster learning.
The only drawback is that it does not deal very well with high-dimensional inputs (images).
Applications of Reservoir Computing
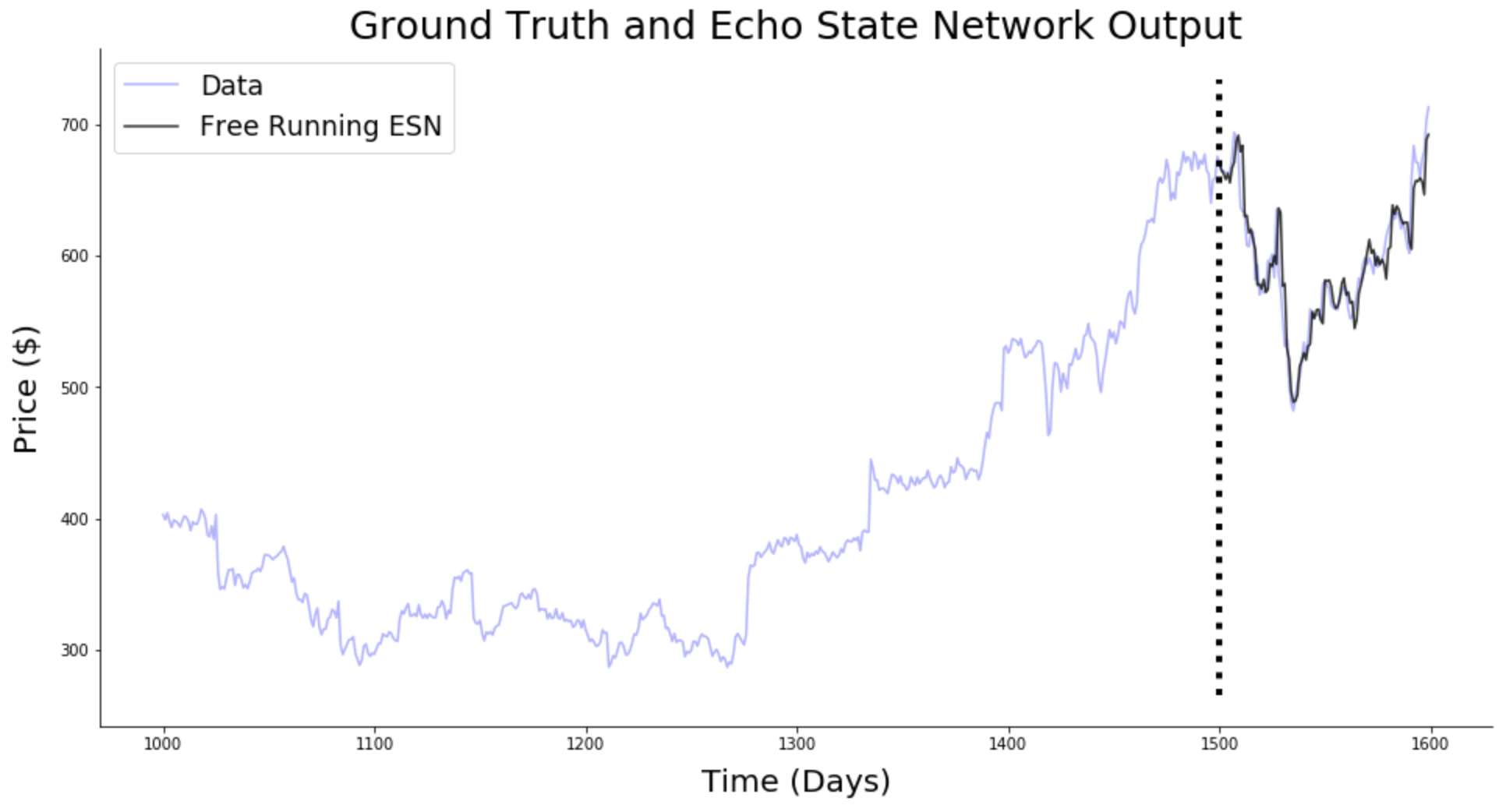
- Forecasting: ESN are able to predict the future of chaotic systems (stock market, weather) much better than static NN.
Applications of Reservoir Computing
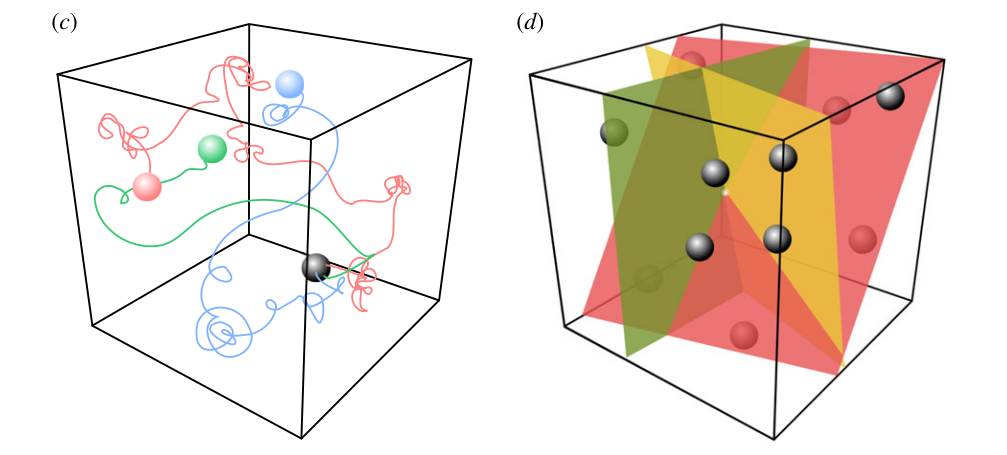
- Physics: RC networks can be used to predict the evolution of chaotic systems (Lorenz, Mackey-Glass, Kuramoto-Sivashinsky) at very long time scales (8 times the Lyapunov time).
Applications of Reservoir Computing
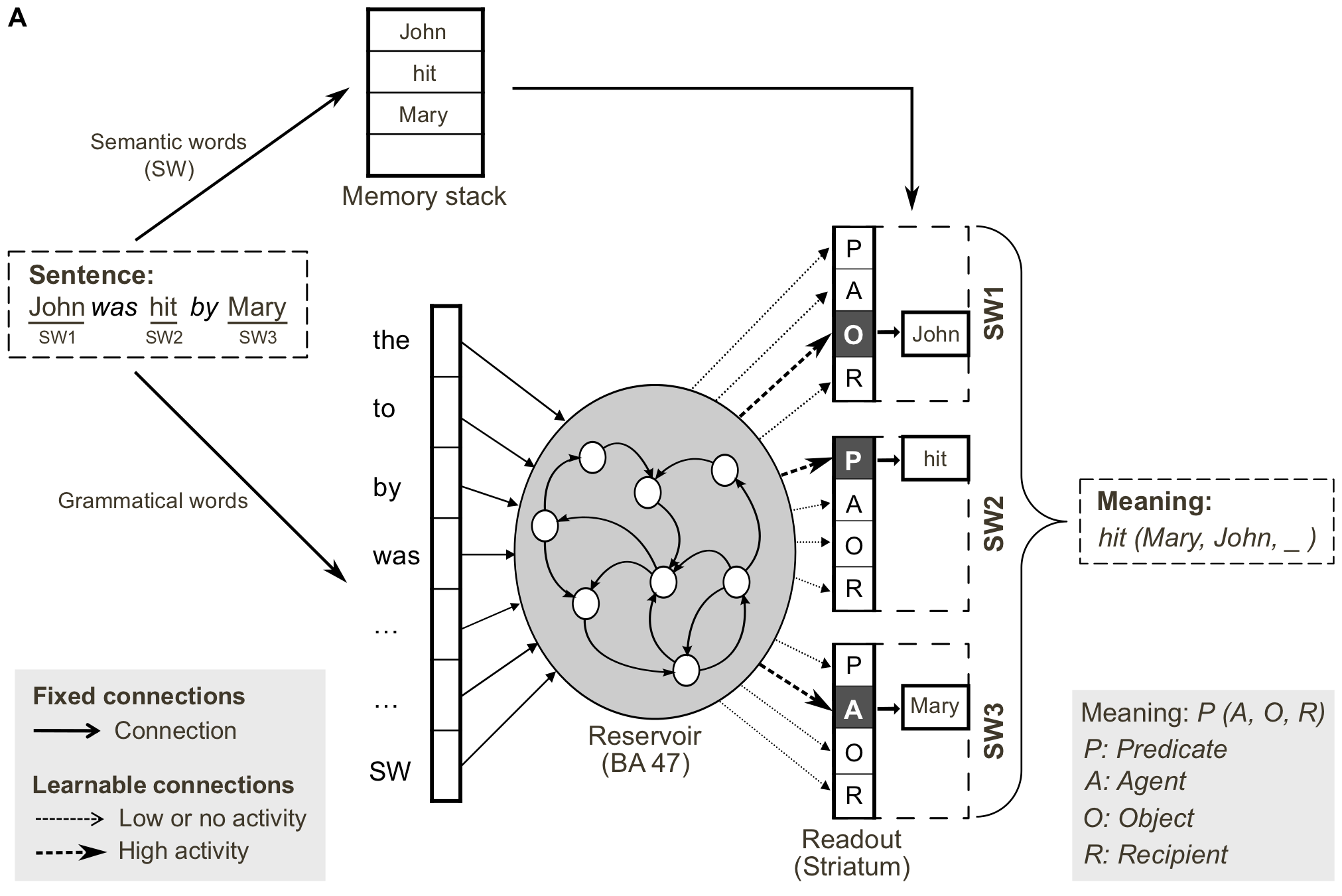
NLP: RC networks can grasp the dynamics of language, i.e. its grammar.
RC networks can be trained to produce predicates (“hit(Mary, John)”) from sentences (“Mary hit John” or “John was hit by Mary”)
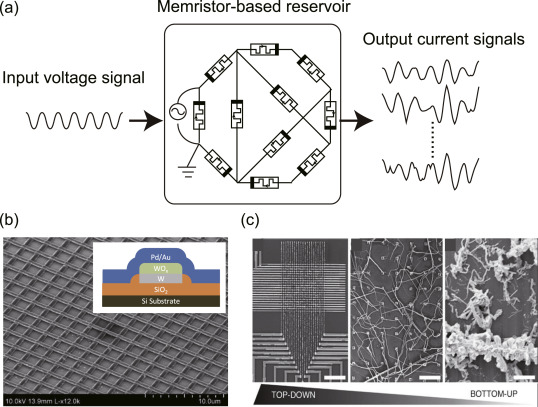
Physical Reservoir Computing
The cool thing with reservoirs is that they do not have to be simulated by classical von Neumann architectures (CPU, GPU).
Anything able to exhibit dynamics at the edge of chaos can be used:
- VLSI (memristors), magnetronics, photonics (lasers), spintronics (nanoscale electronics)…
This can limit drastically the energy consumption of ML algorithms (200W for a GPU).
Even biological or physical systems can be used…
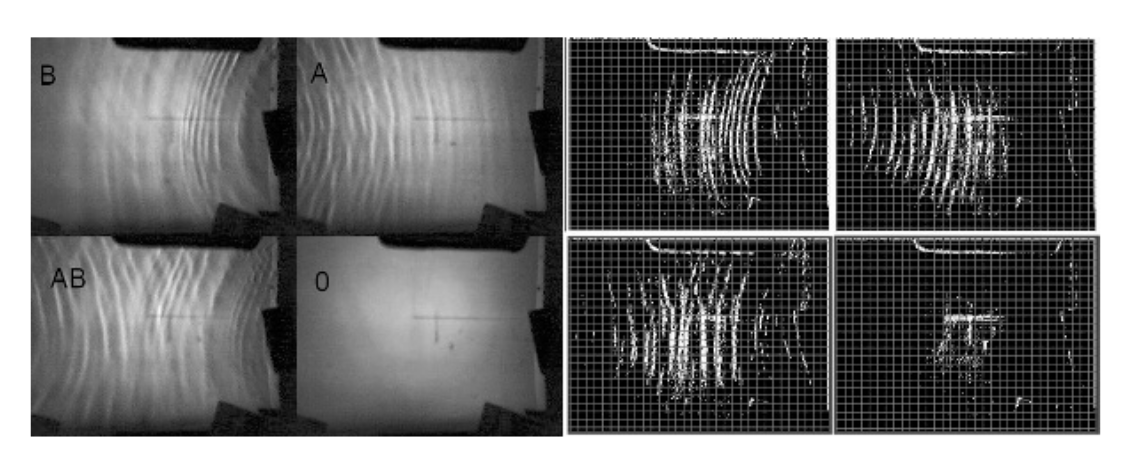
Pattern recognition in a bucket
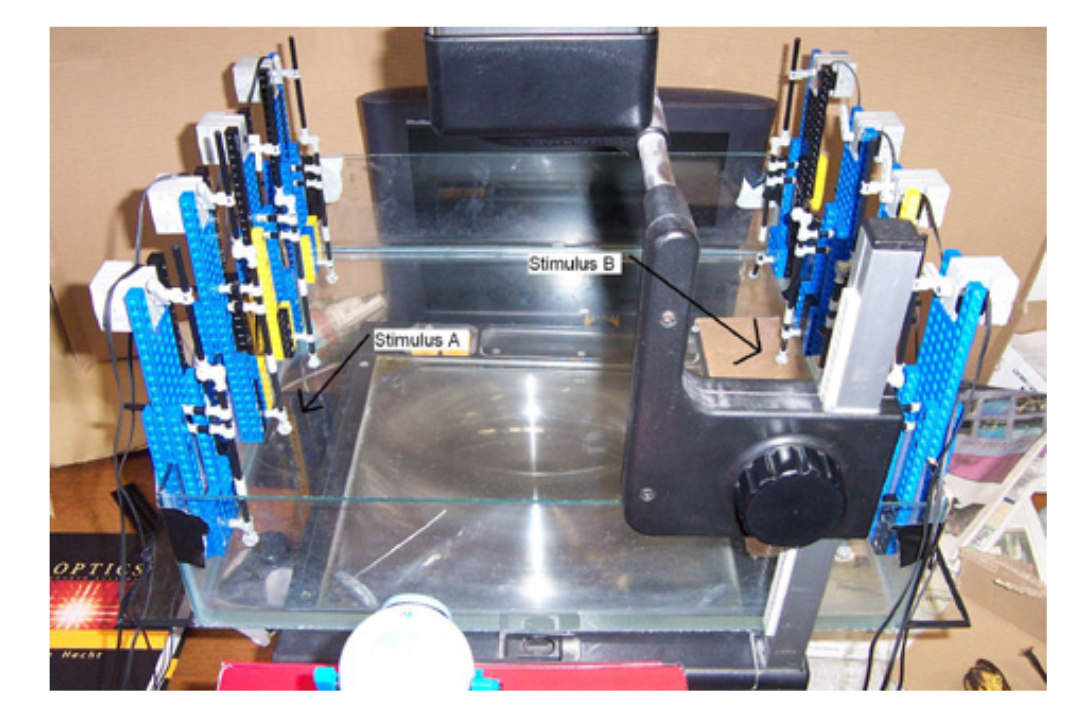
A bucket of water can be used as a reservoir.
Different motors provide inputs to the reservoir by creating weights.
The surface of the bucket is recorded and used as an input to a linear algorithm.
It can learn non-linear operations (XOR) or even speech recognition.
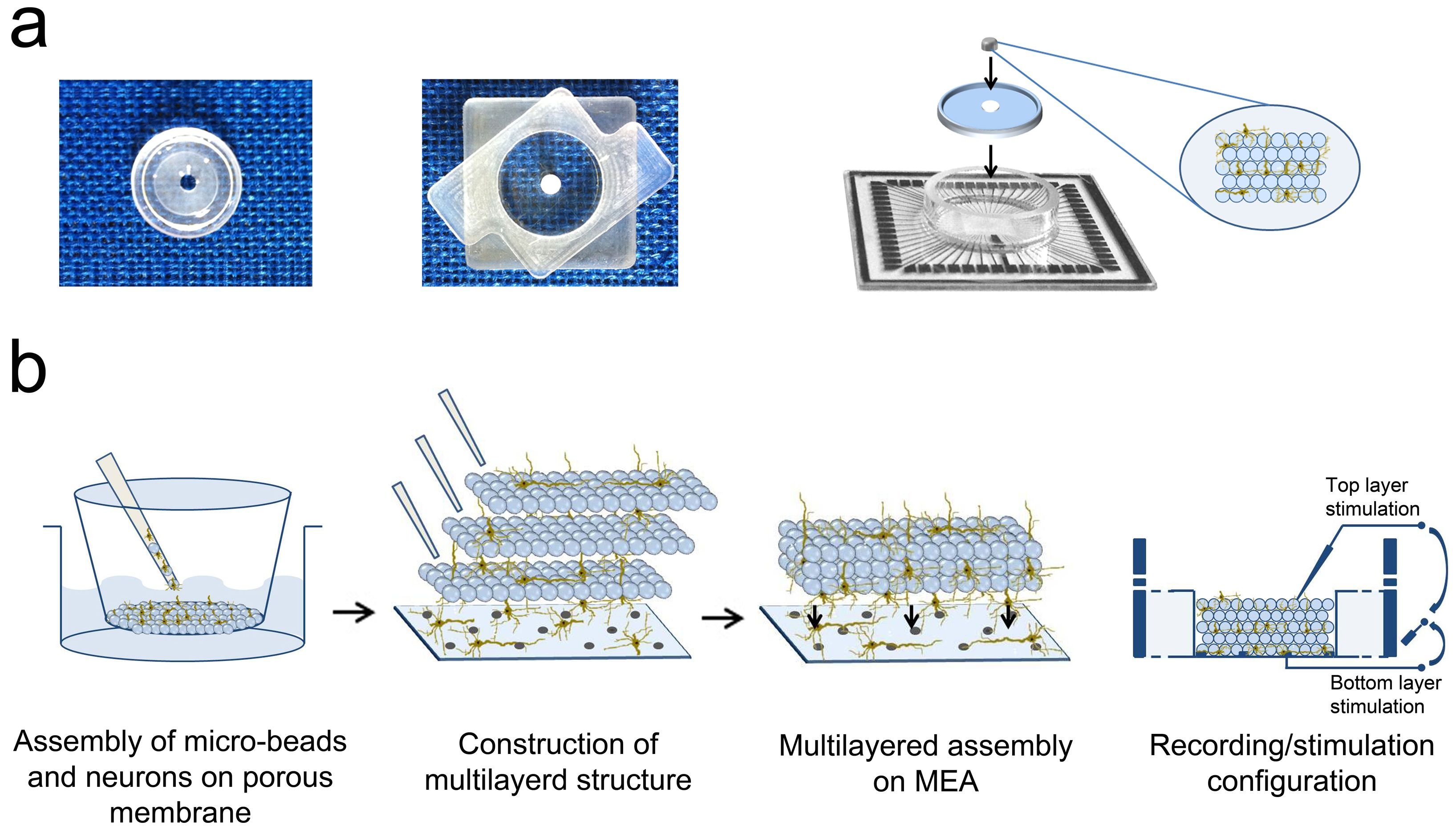
RC with a in-silico culture of biological neurons
- Real biological neurons can be kept alive in a culture and stimulated /recorded to implement a reservoir.
RC in cultures of E.Coli bacteria
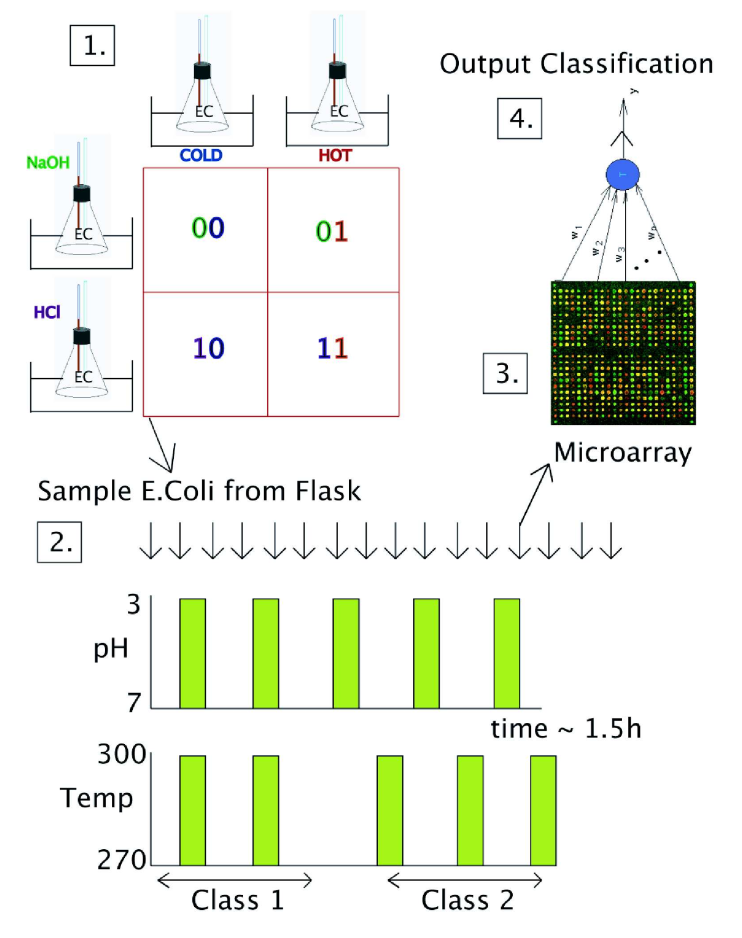
Escherichia Coli bacteria change their mRNA in response to various external factors (temperature, chemical products, etc) and interact with each other.
Their mRNA encode a dynamical trajectory reflecting the inputs.
By placing them on a microarray, one can linearly learn to perform non-linear operations on the inputs.
2 - FORCE learning

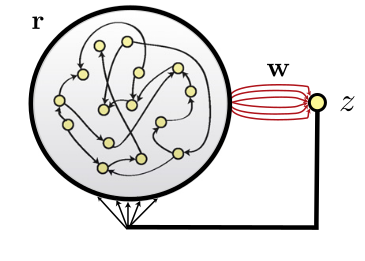
Feedback connections
- The output of the readout neurons can be fed back into the reservoir to stabilize the trajectories:
\tau \, \dfrac{d \mathbf{x}(t)}{dt} + \mathbf{x}(t) = W^\text{IN} \times \mathbf{I}(t) + W^\text{REC} \times \mathbf{r}(t) + W^\text{FB} \times \mathbf{z}(t)
This makes the reservoir much more robust to perturbations, especially at the edge of chaos.
The trajectories are more stable (but still highly dynamical), making the job of the readout neurons easier.
Using feedback, there is even no need for an input I(t). The target value t(t) just needs to be used by the readout layer which should learn to minimize the difference.
A reservoir with feedback can perform autoregression, for example time series prediction.
FORCE Learning
FORCE learning (first-order reduced and controlled error) consists of feeding back the readout into the reservoir and using RLS.
FORCE learning allows to stabilize trajectories in the chaotic reservoir and generate complex patterns in an autoregressive manner.
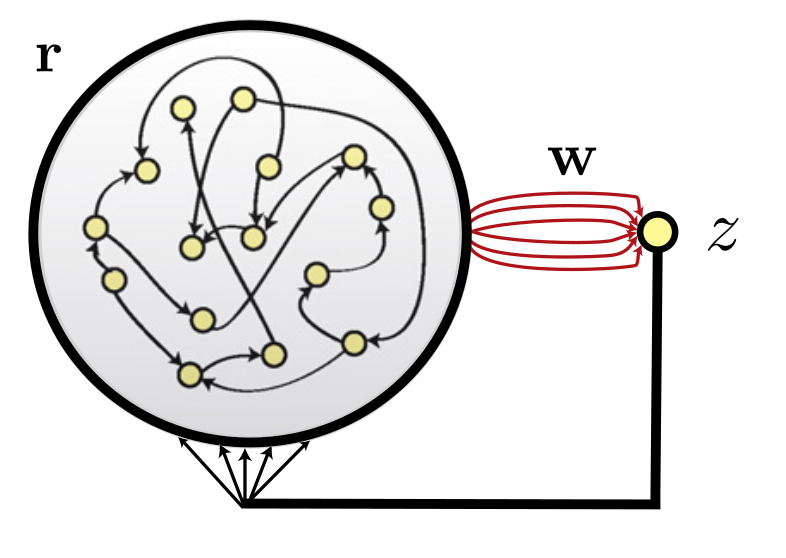
3 - Taming chaos by learning the recurrent weights
Taming chaos by learning the recurrent weights
In classical RC networks, the recurrent weights are fixed and only the readout weights are trained.
The reservoir dynamics are fixed by the recurrent weights, we cannot change them.
Dynamics can be broken by external perturbations or high-amplitude noise.
The edge of chaos is sometimes too close.
If we could learn the recurrent weights, we could force the reservoir to have fixed and robust trajectories, while keeping interesting dynamics.
However, learning in a chaotic system, even with BPTT, is very hard.
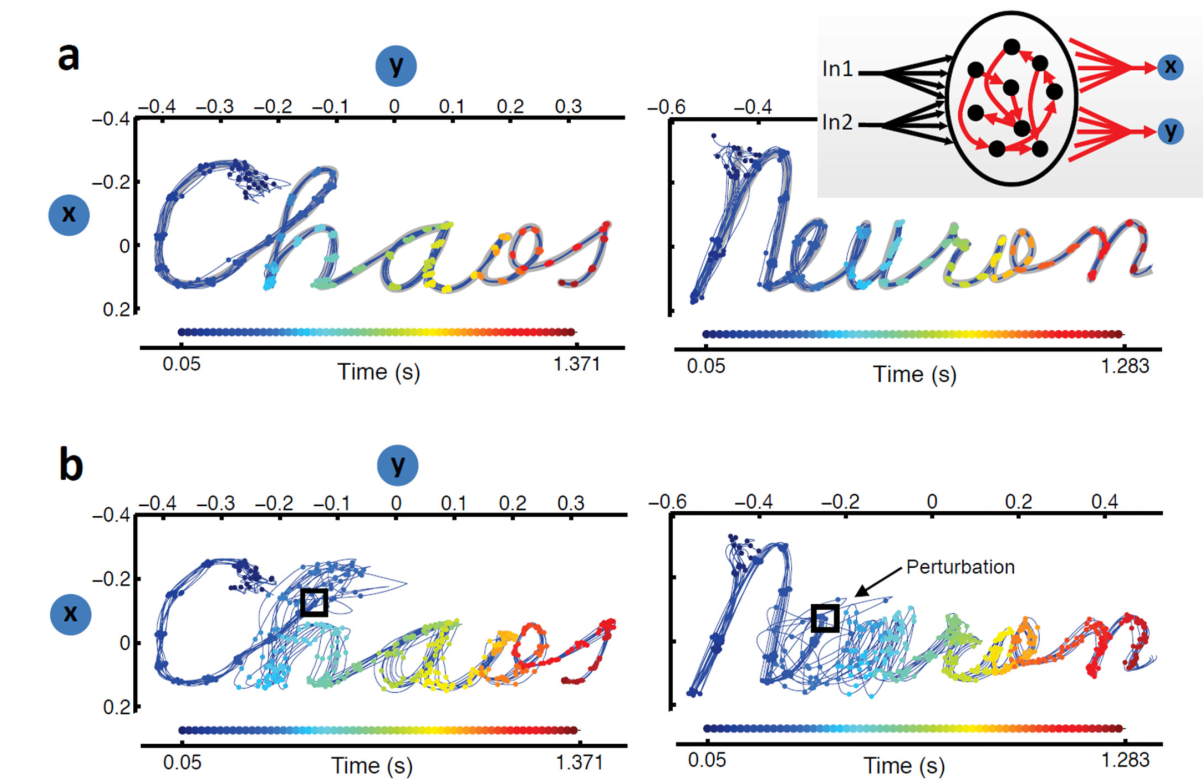
Taming chaos by learning the recurrent weights
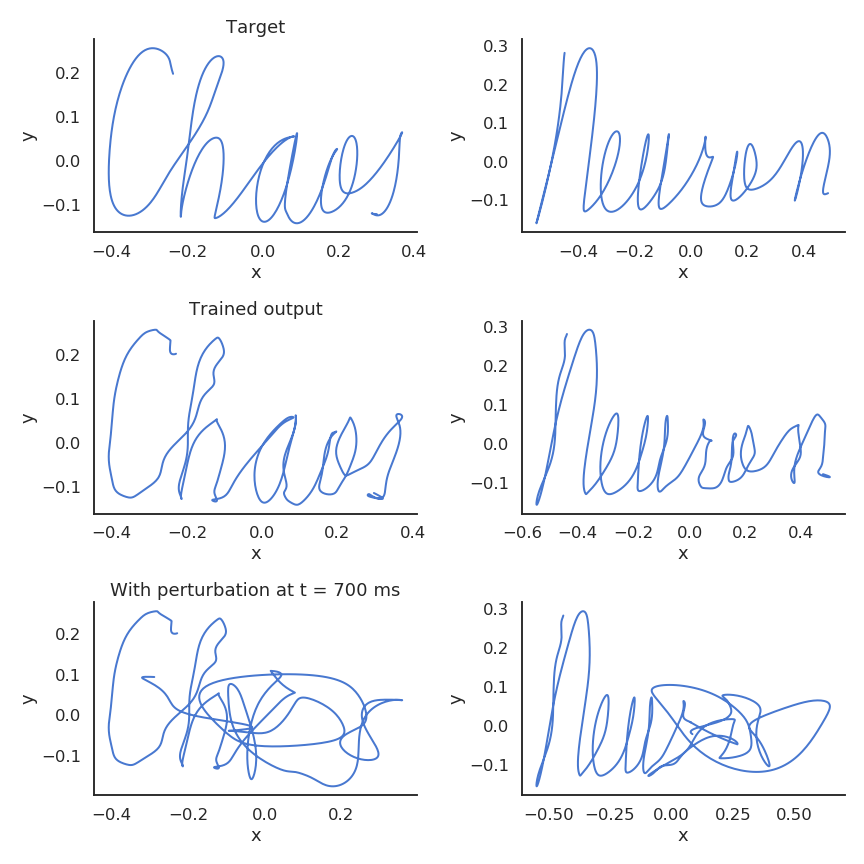
A classical network is trained to reproduce handwriting.
The two readout neurons produce a sequence of (x, y) positions for the pen.
It works quite well when the input is not perturbed.
If some perturbation enters the reservoir, the trajectory is lost.
Training the recurrent connections
We have an output error signal \mathbf{t}_t - \mathbf{z}_t at each time step.
Why can’t we just apply backpropagation (through time) on the recurrent weights?
\mathcal{L}(W, W^\text{OUT}) = \mathbb{E}_{t} [(\mathbf{t}_t - \mathbf{z}_t)^2]
- BPTT is too unstable: the slightest weight change impacts the whole dynamics.
FORCE Learning
With FORCE learning, we have an error term for the readout weights.
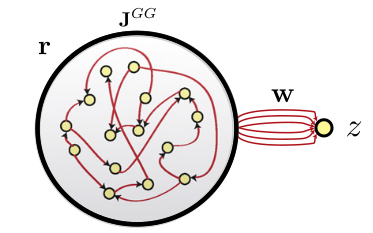
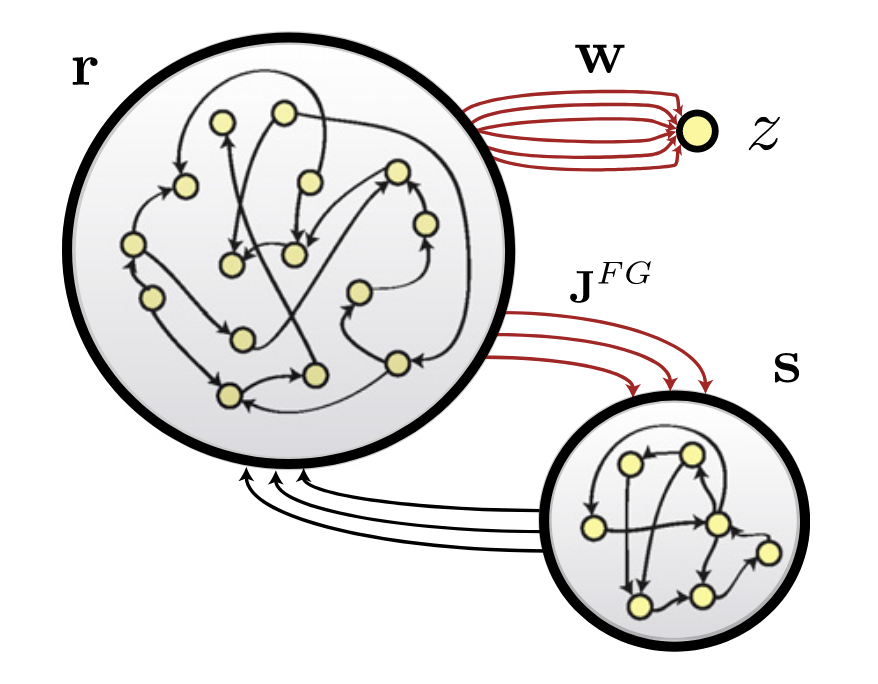
For the recurrent weights, we would also need an error term.
It can computed by recording the dynamics during an initialization trial \mathbf{r}^*_t and forcing the recurrent weights to reproduce these dynamics in the learning trials:
\Delta W = - \eta \, (\mathbf{r}^*_t - \mathbf{r}_t) \times P \times \mathbf{r}_t
This is equivalent to having a fixed, external reservoir providing the targets.
See https://github.com/ReScience-Archives/Vitay-2016 for a reimplementation.
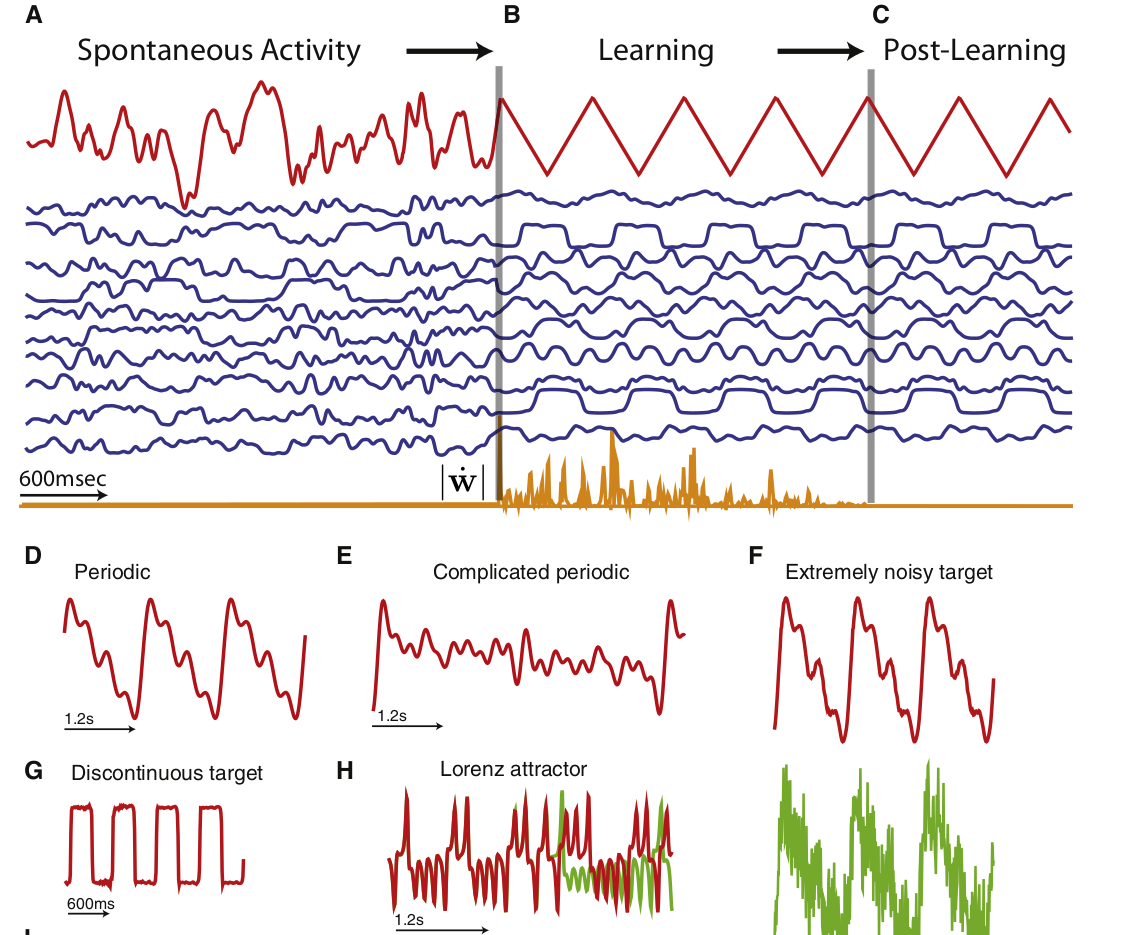
Taming Chaos in RC networks
- This allows to stabilize trajectories in the chaotic reservoir (taming chaos) and generate complex patterns.
Taming Chaos in RC networks
4 - Biologically plausible reward modulated learning in RC
Biologically plausible reward modulated learning in RC
- Miconi proposed a realistic model of reward-based learning in a classical reservoir:
\tau \frac{d \mathbf{x}(t)}{dt} + \mathbf{x}(t) = W^\text{IN} \times \mathbf{I}(t) + W \times \mathbf{r}(t)
\mathbf{r}(t) = \tanh \mathbf{x}(t)
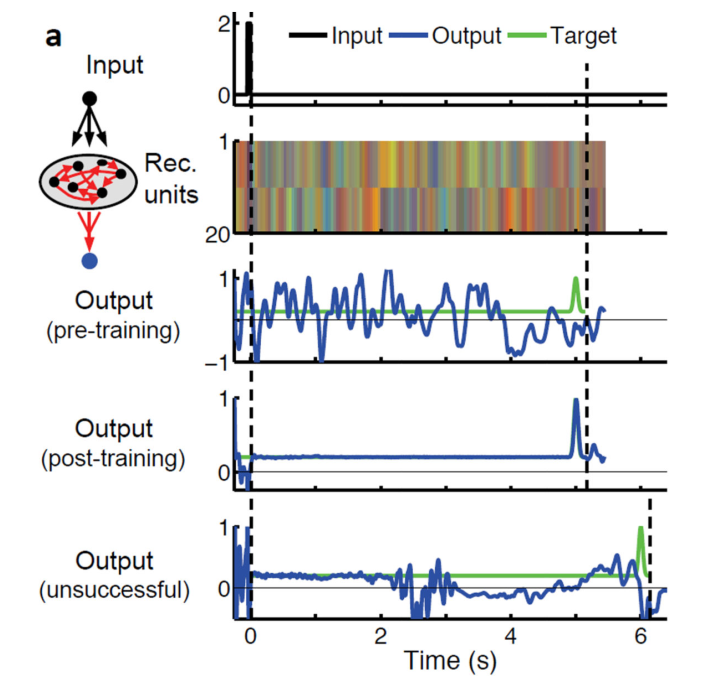
However, there are NO readout neurons: a random neuron of the reservoir is picked as output neuron.
Its activity at the end of a trial is used to provide a reward or not.
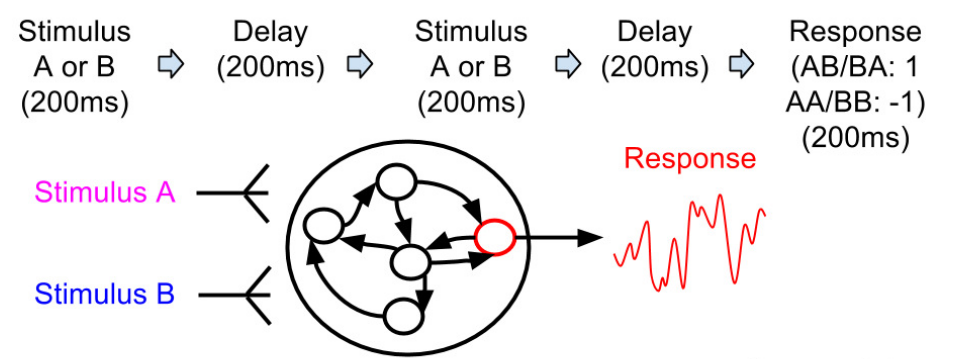
Biologically plausible reward modulated learning in RC
Delayed non-match-to-sample (DNMS) task:
- t = +1 when the cue is different from the sample (AB or BA)
- t = -1 otherwise (AA, BB).
It is a task involving working memory: the first item must be actively remembered in order to produce the response later.
The response is calculated as the mean activity y of the output neuron over the last 200 ms.
The “reward” used is simply the difference between the desired value (t=+1 or -1) and the response:
r = - |t - y|
- The goal is to maximize the sparse reward function, but we know its value only at the end of a trial: temporal credit assignment.
Reward-modulated Hebbian learning
- Reward-modulated Hebbian learning changes weights according to the Hebbian product and the change in reward intake:
\Delta w_{ij} = \eta \, r_i \, r_j \, (R - \bar{R})
- \bar{R} can be a running average of the rewards/returns:
\bar{R} \leftarrow \alpha \, \bar{R} + (1-\alpha) \, R
If more reward than usual is received, the weights between correlated neurons should be increased.
If less reward than usual is received, the weights between correlated neurons should be decreased.
This does not work well with sparse rewards (at the end of a complex sequence).
Weight perturbation
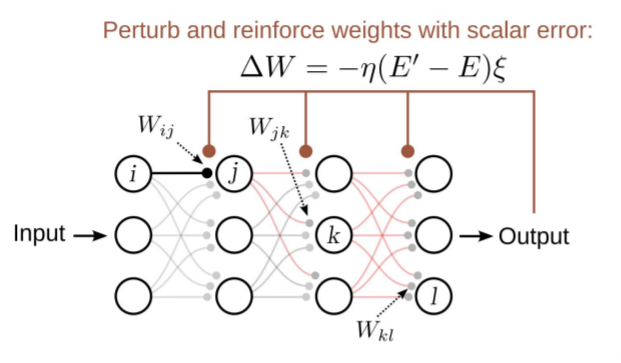
- A simple alternative to backpropagation would consist of adding a perturbation to some weights:
w_{ij} \rightarrow w_{ij} + \xi
and observing the change of reward intake at the end of the episode:
\Delta R = R - \bar{R}
- If the change is positive (the new network gets higher rewards than before), the weight change is conserved. Otherwise it is thrown away or reversed.
\Delta w_{ij} = \eta \, (R - \bar{R}) \, \xi
- Weight perturbation is somehow a way to estimate the gradient of the loss function locally:
\frac{\partial R(\theta)}{\partial w_{ij}} \approx \frac{\Delta R}{\Delta w_{ij}} = \frac{R - \bar{R}}{ w_{ij} + \xi - w_{ij} }
- Core principle of genetic algorithms for NN (e.g. NEAT), but not really biologically realistic…
Exploratory Hebbian (E-H) learning
- Miconi’s idea was to couple node-perturbation (Fiete et al. 2006) with Exploratory-Hebbian learning (Legenstein et al., 2010).
\Delta w_{ij} = \eta \, r_i \, (x_j - \bar{x_j}) \, (R - \bar{R})
where \bar{x_j} is a running average of the postsynaptic activity (a trace of its activity).
The difference x_j - \bar{x_j} contains information about the perturbation, but is local to the synapse (biologically realistic).
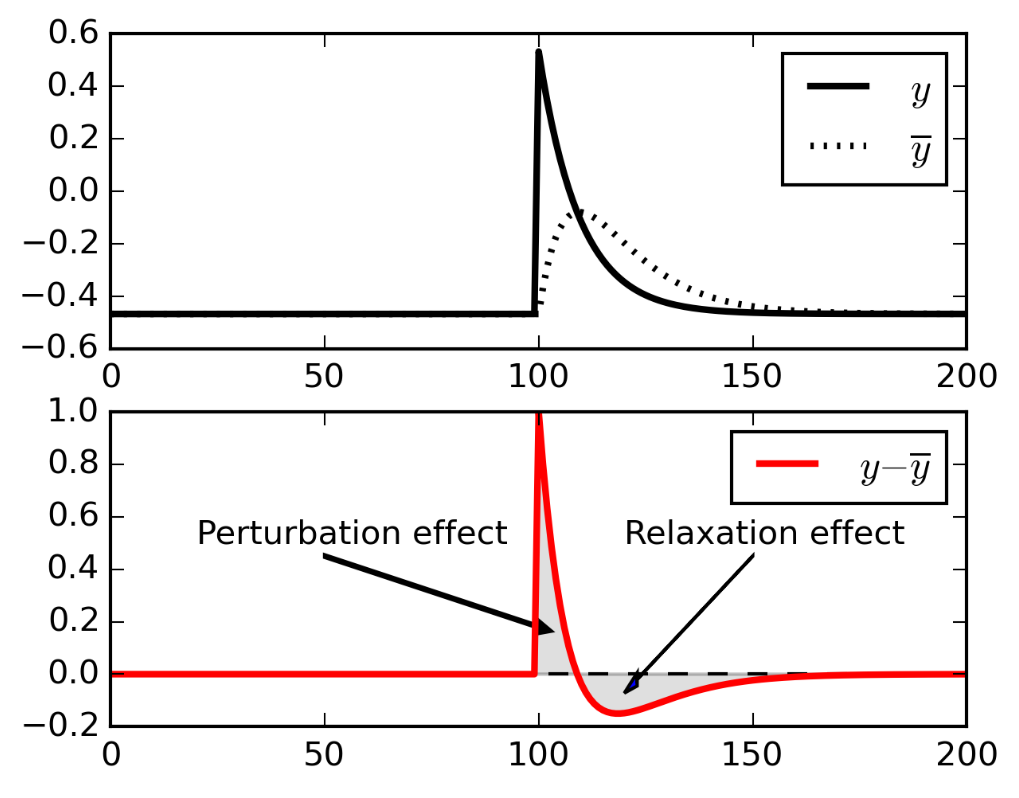
However, the perturbation is canceled by the relaxation. Need for a non-linearity:
\Delta w_{ij} = \eta \, r_i \, (x_j - \bar{x_j})^3 \, (R - \bar{R})
Miconi’s learning rule
- Apply randomly at f=3Hz a perturbation of all the nodes in the reservoir.
x_j \rightarrow x_j + \xi_j
- Maintain a non-linear eligibility trace of the perturbation during the trial.
e_{ij} = e_{ij} + r_i \, (x_j - \bar{x_j})^3
- At the end of the trial, train all weights using the eligibility trace and the change in performance:
\Delta w_{ij} = \eta \, e_{ij} \, (R - \bar{R})
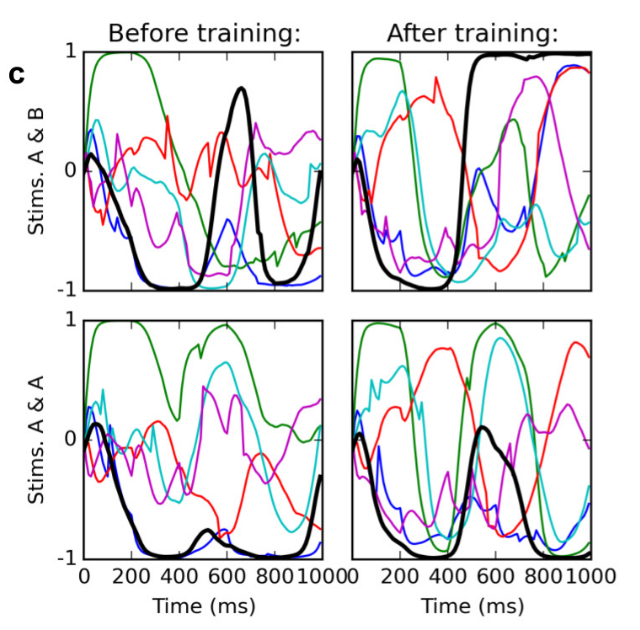
Results : DNMS task
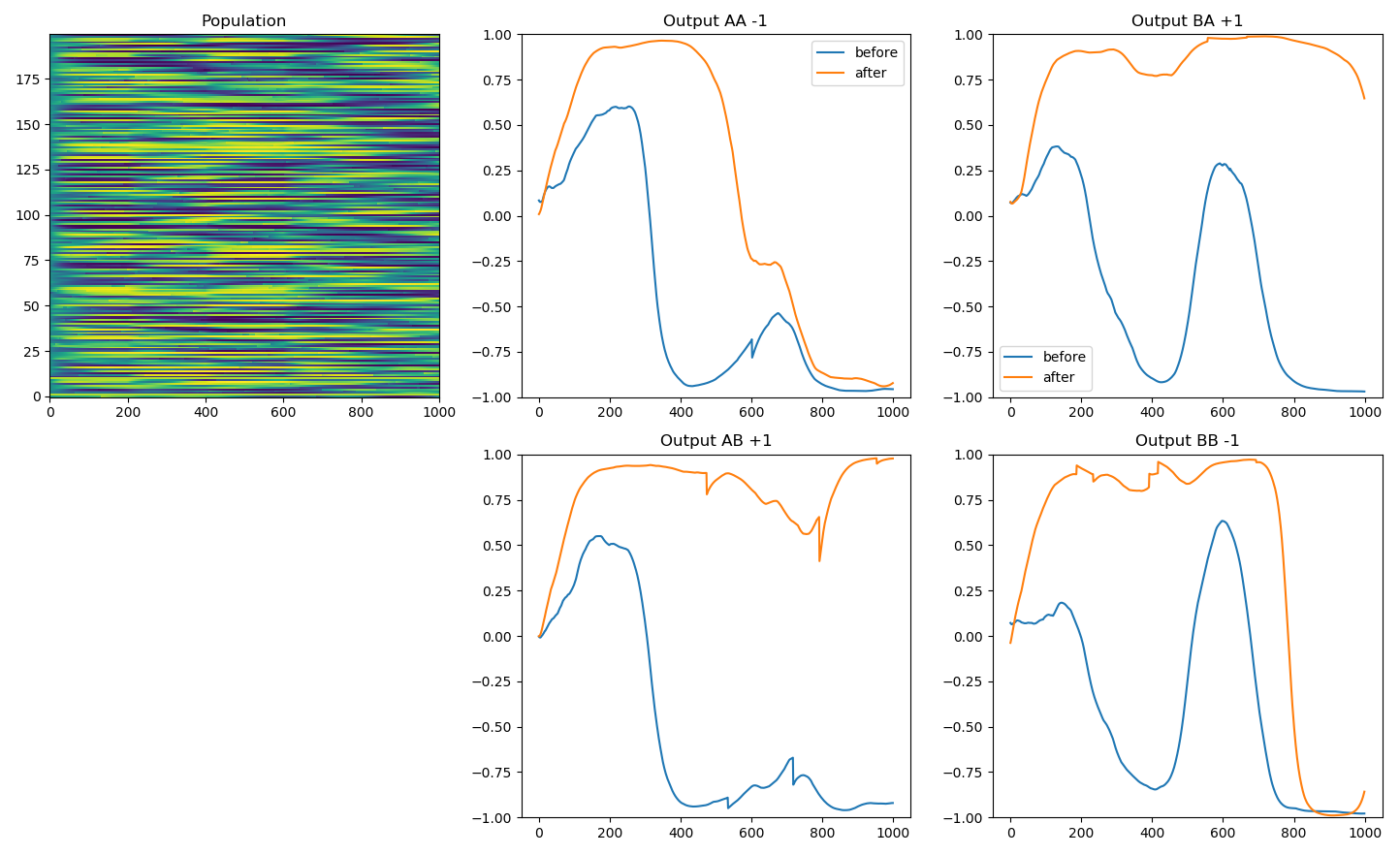
Results : DNMS task
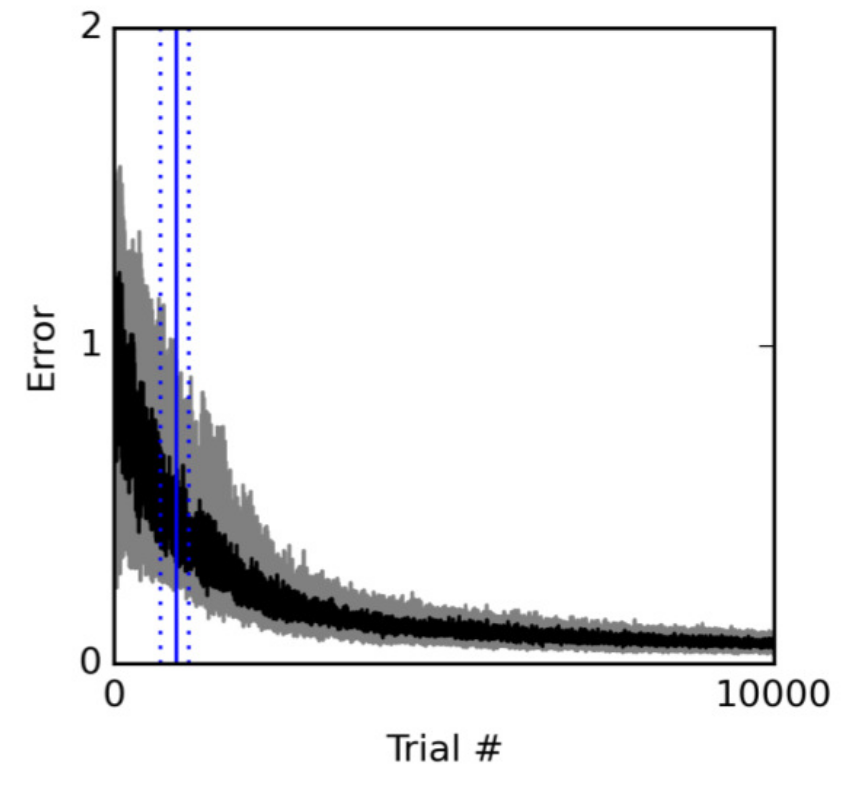
Learning is quite slow (ca 1000 trials), but only from sparse rewards at the end of the trial.
The power of the network does not lie in the readout neurons, but in the dynamics of the reservoir: trajectories are discovered and stabilized using RL.
The only “imperfection” is that learning is actually error-driven, not success-driven:
r = - |t - y|
Results : controlling a robotic arm
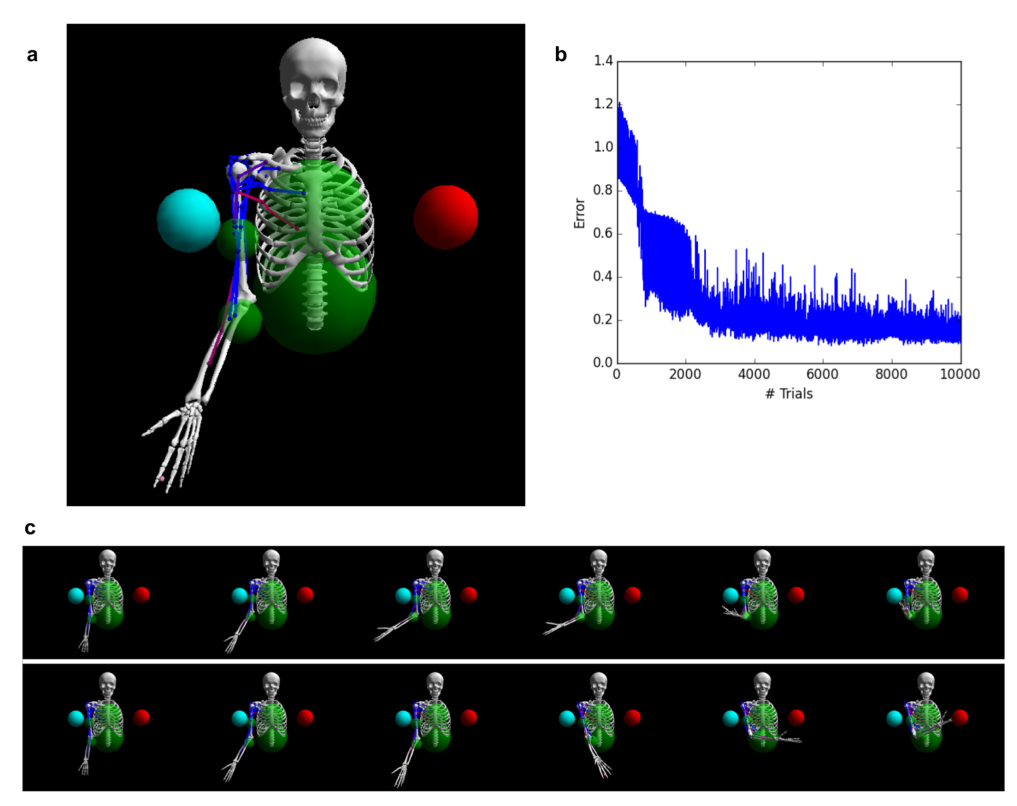
16 motor neurons to control the muscles of an arm.
2 inputs: left / right.
Error is the remaining distance at the end of the trial.