Policy Gradient methods
Approximating directly the Q-values in value-based methods (DQN) suffers from many problems when using deep neural networks:
- The Q-values are unbounded: they can take any value (positive or negative), so the output layer must be linear.
- The Q-values have a high variability: some (s,a) pairs have very negative values, others have very positive values. Difficult to learn for a NN.
- It works only for small discrete action spaces: we need to iterate over all actions to find the greedy action.
Instead of learning the Q-values, one could approximate directly the policy \pi_\theta(s, a) with the neural network. \pi_\theta(s, a) is then called a parameterized policy, as it depends directly on the parameters \theta of the NN. For discrete action spaces, the output of the NN can be a softmax layer, directly giving the probability of selecting an action. For continuous action spaces, the output layer can directly control the effector (e.g. the joint angles of a robotic arm). Parameterized policies can represent continuous policies and avoid the curse of dimensionality. See Section Continuous action spaces for more details.
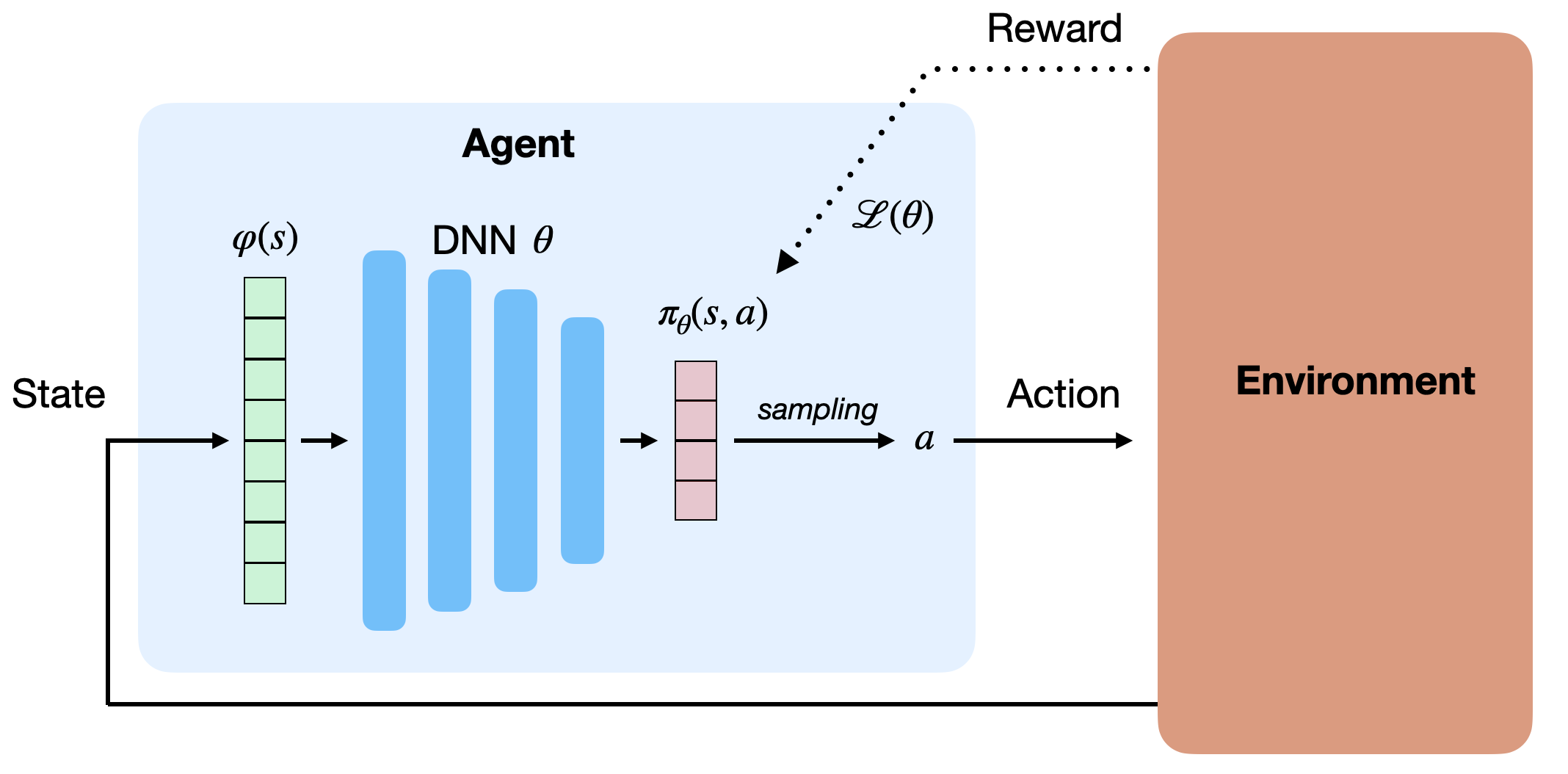
Policy search
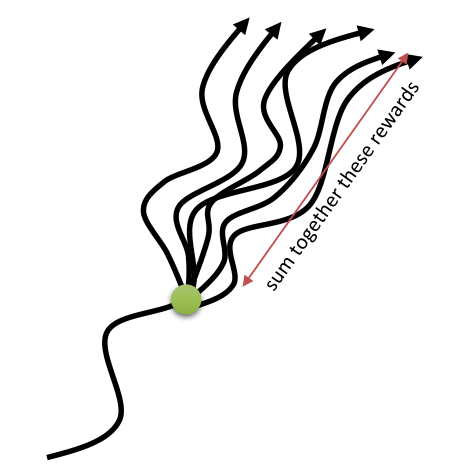
Policy search methods directly learn to estimate the policy \pi_\theta with a parameterized function estimator. The goal of the neural network is to maximize an objective function representing the return (sum of rewards, noted R(\tau) for simplicity) of the trajectories \tau = (s_0, a_0, s_1, a_1, \ldots, s_T, a_T) selected by the policy \pi_\theta:
J(\theta) = \mathbb{E}_{\tau \sim \rho_\theta}[R(\tau)] = \mathbb{E}_{\tau \sim \rho_\theta}[\sum_{t=0}^T \gamma^t \, r(s_t, a_t, s_{t+1}) ]

To maximize this objective function, the policy \pi_\theta should only generate trajectories \tau associated with high returns R(\tau) and avoid those with low return, which is exactly what we want.
The objective function uses the mathematical expectation of the return over all possible trajectories. The likelihood that a trajectory is generated by the policy \pi_\theta is noted \rho_\theta(\tau) and given by:
\rho_\theta(\tau) = p_\theta(s_0, a_0, \ldots, s_T, a_T) = p_0 (s_0) \, \prod_{t=0}^T \pi_\theta(s_t, a_t) p(s_{t+1} | s_t, a_t)
p_0 (s_0) is the initial probability of starting in s_0 (independent from the policy) and p(s_{t+1} | s_t, a_t) is the transition probability defining the MDP. Having the probability distribution of the trajectories, we can expand the mathematical expectation in the objective function:
J(\theta) = \int_\tau \rho_\theta (\tau) \, R(\tau) \, d\tau
Monte Carlo sampling could be used to estimate the objective function. One basically would have to sample multiple trajectories \{\tau_i\} and average the obtained returns:
J(\theta) \approx \frac{1}{N} \, \sum_{i=1}^N R(\tau_i)
However, this approach would suffer from several problems:
- The trajectory space is extremely huge, so one would need a lot of sampled trajectories to have a correct estimate of the objective function (high variance).
- For stability reasons, only small changes can be made to the policy at each iteration, so it would necessitate a lot of episodes (sample complexity).
- For continuing tasks (T = \infty), the return can not be estimated as the episode never ends.
The policy search methods presented in this section are called policy gradient methods. As we are going to apply gradient ascent on the weights \theta in order to maximize J(\theta), all we actually need is the gradient \nabla_\theta J(\theta) of the objective function w.r.t the weights:
\nabla_\theta J(\theta) = \frac{\partial J(\theta)}{\partial \theta}
Once a suitable estimation of this policy gradient is obtained, gradient ascent is straightforward:
\theta \leftarrow \theta + \eta \, \nabla_\theta J(\theta)
The rest of this section basically presents methods allowing to estimate the policy gradient (REINFORCE, DPG) and to improve the sample complexity. See:
- http://www.scholarpedia.org/article/Policy_gradient_methods for an more detailed overview of policy gradient methods,
- https://lilianweng.github.io/lil-log/2018/04/08/policy-gradient-algorithms.html and
- http://karpathy.github.io/2016/05/31/rl/ for excellent tutorials from Lilian Weng and Andrej Karpathy.
The article by Peters and Schaal (2008) is also a good overview of policy gradient methods.
REINFORCE
Estimating the policy gradient
Williams (1992) proposed a useful estimate of the policy gradient. Considering that the return R(\tau) of a trajectory does not depend on the parameters \theta, one can simplify the policy gradient in the following way:
\nabla_\theta J(\theta) = \nabla_\theta \int_\tau \rho_\theta (\tau) \, R(\tau) \, d\tau = \int_\tau (\nabla_\theta \rho_\theta (\tau)) \, R(\tau) \, d\tau
We now use the log-trick, a simple identity based on the fact that:
\frac{d \log f(x)}{dx} = \frac{f'(x)}{f(x)}
to rewrite the policy gradient of a single trajectory:
\nabla_\theta \rho_\theta (\tau) = \rho_\theta (\tau) \, \nabla_\theta \log \rho_\theta (\tau)
The policy gradient becomes:
\nabla_\theta J(\theta) = \int_\tau \rho_\theta (\tau) \, \nabla_\theta \log \rho_\theta (\tau) \, R(\tau) \, d\tau
which now has the form of a mathematical expectation:
\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \rho_\theta}[ \nabla_\theta \log \rho_\theta (\tau) \, R(\tau) ]
This means that we can obtain an estimate of the policy gradient by simply sampling different trajectories \{\tau_i\} and averaging \nabla_\theta \log \rho_\theta (\tau_i) \, R(\tau_i) (Monte Carlo sampling).
Let’s now look further at how the gradient of the log-likelihood of a trajectory \log \pi_\theta (\tau) look like. Through its definition, the log-likelihood of a trajectory is:
\log \rho_\theta(\tau) = \log p_0 (s_0) + \sum_{t=0}^T \log \pi_\theta(s_t, a_t) + \sum_{t=0}^T \log p(s_{t+1} | s_t, a_t)
\log p_0 (s_0) and \log p(s_{t+1} | s_t, a_t) do not depend on the parameters \theta (they are defined by the MDP), so the gradient of the log-likelihood is simply:
\nabla_\theta \log \rho_\theta(\tau) = \sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t)
\nabla_\theta \log \pi_\theta(s_t, a_t) is called the score function.
This is the main reason why policy gradient algorithms are used: the gradient is independent from the MDP dynamics, allowing model-free learning. The policy gradient is then given by:
\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \rho_\theta}[\sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) \, R(\tau) ] = \mathbb{E}_{\tau \sim \rho_\theta}[ \sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) \, (\sum_{t=0}^T \gamma^t r_{t+1})]
Estimating the policy gradient now becomes straightforward using Monte Carlo sampling. The resulting algorithm is called the REINFORCE algorithm (Williams, 1992):
While very simple, the REINFORCE algorithm does not work very well in practice:
- The returns \{R(\tau_i)\} have a very high variance (as the Q-values in value-based methods), which is problematic for NNs.
- It requires a lot of episodes to converge (sample inefficient).
- It only works with online learning: trajectories must be frequently sampled and immediately used to update the policy.
- The problem must be episodic (T finite).
However, it has two main advantages:
- It is a model-free method, i.e. one does not need to know anything about the MDP.
- It also works on partially observable problems (POMDP): as the return is computed over complete trajectories, it does not matter if the states are not Markovian.
The methods presented in this section basically try to solve the limitations of REINFORCE (high variance, sample efficiency, online learning) to produce efficient policy gradient algorithms.
Reducing the variance
The main problem with the REINFORCE algorithm is the high variance of the policy gradient. This variance comes from the fact that we learn stochastic policies (it is often unlikely to generate twice the exact same trajectory) in stochastic environments (rewards are stochastic, the same action in the same state may receive). Two trajectories which are identical at the beginning will be associated with different returns depending on the stochasticity of the policy, the transition probabilities and the probabilistic rewards.
Consider playing a game like chess with always the same opening, and then following a random policy. You may end up winning (R=1) or losing (R=-1) with some probability. The initial actions of the opening will receive a policy gradient which is sometimes positive, sometimes negative: were these actions good or bad? Should they be reinforced? In supervised learning, this would mean that the same image of a cat will be randomly associated to the labels “cat” or “dog” during training: the NN will not like it.
In supervised learning, there is no problem of variance in the outputs, as training sets are fixed. This is in contrary very hard to ensure in deep RL and constitutes one of its main limitations. The only direct solution is to sample enough trajectories and hope that the average will be able to smooth the variance. The problem is even worse in the following conditions:
- High-dimensional action spaces: it becomes difficult to sample the environment densely enough if many actions are possible.
- Long horizons: the longer the trajectory, the more likely it will be unique.
- Finite samples: if we cannot sample enough trajectories, the high variance can introduce a bias in the gradient, leading to poor convergence.
See https://medium.com/mlreview/making-sense-of-the-bias-variance-trade-off-in-deep-reinforcement-learning-79cf1e83d565 for a nice explanation of the bias/variance trade-off in deep RL.
Another related problem is that the REINFORCE gradient is sensitive to reward scaling. Let’s consider a simple MDP where only two trajectories \tau_1 and \tau_2 are possible. Depending on the choice of the reward function, the returns may be different:
- R(\tau_1) = 1 and R(\tau_2) = -1
- R(\tau_1) = 3 and R(\tau_2) = 1
In both cases, the policy should select the trajectory \tau_1. However, the policy gradient for \tau_2 will change its sign between the two cases, although the problem is the same! What we want to do is to maximize the returns, regardless the absolute value of the rewards, but the returns are unbounded. Because of the non-stationarity of the problem (the agent becomes better with training, so the returns of the sampled trajectories will increase), the policy gradients will increase over time, what is linked to the variance problem. Value-based methods addressed this problem by using target networks, but it is not a perfect solution (the gradients become biased).
A first simple but effective idea to solve both problems would be to subtract the mean of the sampled returns from the returns:
This obviously solves the reward scaling problem, and reduces the variance of the gradients. But are we allowed to do this (i.e. does it introduce a bias to the gradient)? Williams (1992) showed that subtracting a constant b from the returns still leads to an unbiased estimate of the gradient:
\nabla_\theta J(\theta) = \mathbb{E}_{\tau \sim \rho_\theta}[\nabla_\theta \log \rho_\theta (\tau) \, (R(\tau) -b) ]
The proof is actually quite simple:
\begin{aligned} \mathbb{E}_{\tau \sim \rho_\theta}[\nabla_\theta \log \rho_\theta (\tau) \, b ] & = \int_\tau \rho_\theta (\tau) \nabla_\theta \log \rho_\theta (\tau) \, b \, d\tau \\ & = \int_\tau \nabla_\theta \rho_\theta (\tau) \, b \, d\tau \\ &= b \, \nabla_\theta \int_\tau \rho_\theta (\tau) \, d\tau \\ &= b \, \nabla_\theta 1 \\ &= 0 \end{aligned}
As long as the constant b does not depend on \theta, the estimator is unbiased. The resulting algorithm is called REINFORCE with baseline. Williams (1992) has actually showed that the best baseline (the one which also reduces the variance) is the mean return weighted by the square of the gradient of the log-likelihood:
b = \frac{\mathbb{E}_{\tau \sim \rho_\theta}[(\nabla_\theta \log \rho_\theta (\tau))^2 \, R(\tau)]}{\mathbb{E}_{\tau \sim \rho_\theta}[(\nabla_\theta \log \rho_\theta (\tau))^2]}
but the mean reward actually work quite well. Advantage actor-critic methods replace the constant b with an estimate of the value of each state \hat{V}(s_t).
Policy Gradient theorem
Let’s have another look at the REINFORCE estimate of the policy gradient after sampling:
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) \, R(\tau_i) = \frac{1}{N} \sum_{i=1}^N (\sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) ) \, (\sum_{t'=0}^T \gamma^{t'} \, r(s_{t'}, a_{t'}, s_{t'+1}) )
For each transition (s_t, a_t), the gradient of its log-likelihood (score function) \nabla_\theta \log \pi_\theta(s_t, a_t) ) is multiplied by the return of the whole episode R(\tau) = \sum_{t'=0}^T \gamma^{t'} \, r(s_{t'}, a_{t'}, s_{t'+1}). However, the causality principle dictates that the reward received at t=0 does not depend on actions taken in the future, so we can simplify the return for each transition:
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N (\sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) \, \sum_{t'=t}^T \gamma^{t'-t} \, r(s_{t'}, a_{t'}, s_{t'+1}) )
The quantity R_t = \sum_{t'=t}^T \gamma^{t'-t} \, r(s_{t'}, a_{t'}, s_{t'+1}) is the return (or reward to-go) after the transition (s_t, a_t), i.e. the discounted sum of future rewards. Quite obviously, the Q-value of that action is the mathematical expectation of this quantity.
\nabla_\theta J(\theta) \approx \frac{1}{N} \sum_{i=1}^N \sum_{t=0}^T \nabla_\theta \log \pi_\theta(s_t, a_t) \, R_t
Sutton et al. (1999) showed that the policy gradient can be estimated by replacing the return of the sampled trajectory with the Q-value of each action, what leads to the policy gradient theorem:
\nabla_\theta J(\theta) = \mathbb{E}_{s \sim \rho_\theta, a \sim \pi_\theta}[\nabla_\theta \log \pi_\theta(s, a) \, Q^{\pi_\theta}(s, a)]
where \rho_\theta is the distribution of states reachable under the policy \pi_\theta. Because the actual return R(\tau) is replaced by its expectation Q^{\pi_\theta}(s, a), the policy gradient is now a mathematical expectation over single transitions instead of complete trajectories, allowing bootstrapping as in temporal difference methods.
One clearly sees that REINFORCE is actually a special case of the policy gradient theorem, where the Q-value of an action replaces the return obtained during the corresponding trajectory.
The problem is of course that the true Q-value of the actions is as unknown as the policy. However, Sutton et al. (1999) showed that it is possible to estimate the Q-values with a function approximator Q_\varphi(s, a) with parameters \varphi and obtain an unbiased estimation:
\nabla_\theta J(\theta) = \mathbb{E}_{s \sim \rho_\theta, a \sim \pi_\theta}[\nabla_\theta \log \pi_\theta(s, a) \, Q_\varphi(s, a))]
Formally, the Q-value approximator must respect the Compatible Function Approximation Theorem, which states that the value approximator must be compatible with the policy (\nabla_\varphi Q_\varphi(s, a) = \nabla_\theta \log \pi_\theta(s, a)) and minimize the mean-square error with the true Q-values \mathbb{E}_{s \sim \rho^\pi, a \sim \pi_\theta} [(Q^{\pi_\theta}(s, a) - Q_\varphi(s, a))^2]. In the algorithms presented in this section, these conditions are either met or neglected.
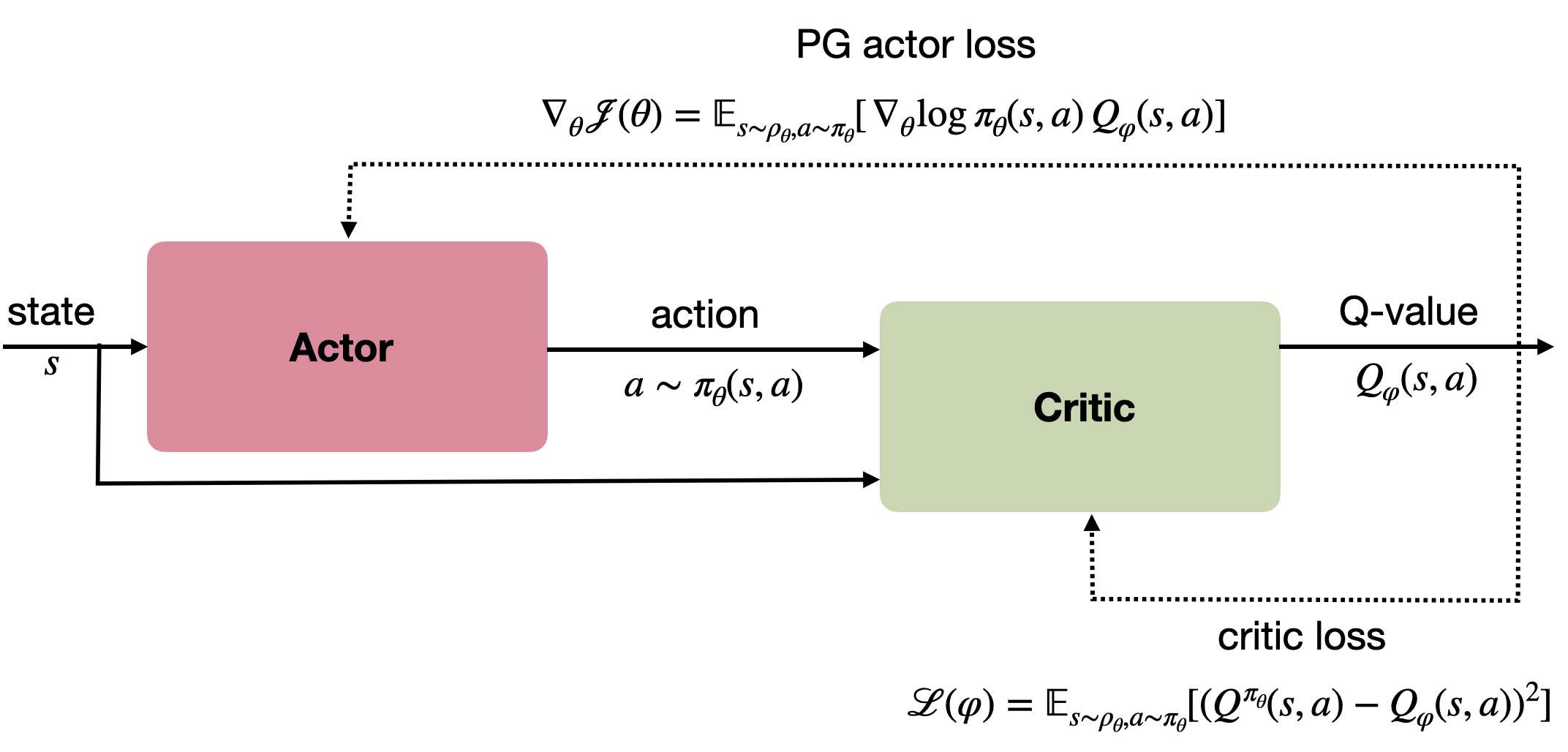
The resulting algorithm belongs to the actor-critic class, in the sense that:
- The actor \pi_\theta(s, a) learns to approximate the policy by using the policy gradient.
- The critic Q_\varphi(s, a) learns to estimate the Q-values of the actions generated by the policy.
Figure 1 shows the architecture of the algorithm. The only problem left is to provide the critic with the true Q-values (Bellman targets).
The critic can be trained with any advantage estimator, including Q-learning. It is common to use the DQN loss (or any variant of it: double DQN, n-step, etc) for the critic.
\mathcal{L}(\varphi) = \mathbb{E}_{s_t \sim \rho_\theta, a_t \sim \pi_\theta} [(r(s, a, s') + \gamma \, Q_{\varphi'}(s', \text{argmax}_{a'} Q_\varphi (s', a')) - Q_\varphi (s, a) )^2]